DYMO-Hair
Generalizable Volumetric DYnamics MOdeling for Robot Hair Manipulation
Team
1 Carnegie Mellon University
2 Epic Games
3 Meta Codec Avatars Lab
4 Bosch Center for AI
TL;DR
- A study of model-based approaches for robot hair manipulation.
- DYMO-Hair, a unified, model-based robot system for visual goal-conditioned hair styling, evaluated across diverse hairstyles in simulation and real-world settings.
- A 3D volumetric dynamics model for hair combing, generalizable to diverse unseen hairstyles, enabled by a compact 3D latent space of diverse hairstyles and an action-conditioned latent state editing mechanism.
- A hair simulator with a novel Position-Based Dynamics (PBD) method for strand-level, contact-rich hair-combing simulation.
Hair State Representation for Dynamics Modeling
Static State
Grid Corresponding
Strand Segments [Proposed]
Dynamics Process
Grid Corresponding
Strand Segments [Proposed]
Design Highlight
Representing hair state as a high-resolution volumetric occupancy grid with a 3D orientation field, enabling:
- Capturing both the spatial distribution and the flow direction of hair, achieving high fidelity.
- Efficient and robust state estimation from multi-view RGB-D data in the real world.
- More structured processing with highly optimized neural operators and dense voxel-level supervision for learning.
- Maintaining acceptable accuracy when resolution is sufficiently high.
Hair Combing Dynamics Learning
Design Highlight
A novel two-phase neural dynamics learning paradigm, designed for generalizable volumetric hair dynamics modeling.
- Phase 1: Pre-training a compact 3D latent space for diverse hair states (various hairstyles and deformations).
- Phase 2: Adapting the pre-trained model with a ControlNet-style framework for dynamics learning, formulating the dynamics as an action-conditioned latent state editing process.
DYMO-Hair System: Visual Goal-conditioned Hair Styling
Design Highlight
- A model-based, closed-loop system, capable of handling diverse hairstyles and visual goal configurations.
Strand-level, Contact-rich Hair Combing Simulation
Design Highlight
- With all three constraints, the hair maintains a realistic shape.
- The twist constraint, in particular, preserves the strand's curvature and prevents gravity-induced oversmoothing.
Dynamics Learning Results on Unseen Hairstyles
Key Takeaway
- Our model outperforms all baselines in capturing local deformation for unseen hairstyles, highlighting the effectiveness and generalizability of our model on hair-combing dynamics modeling.
Hair Styling Simulation Results on Unseen Hairstyles
All Method Comparisons on Hard Cases
Goal
Goal
Goal
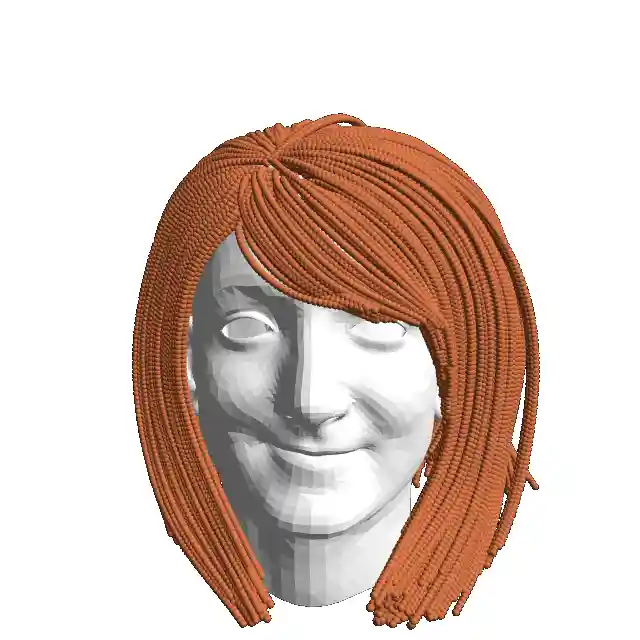
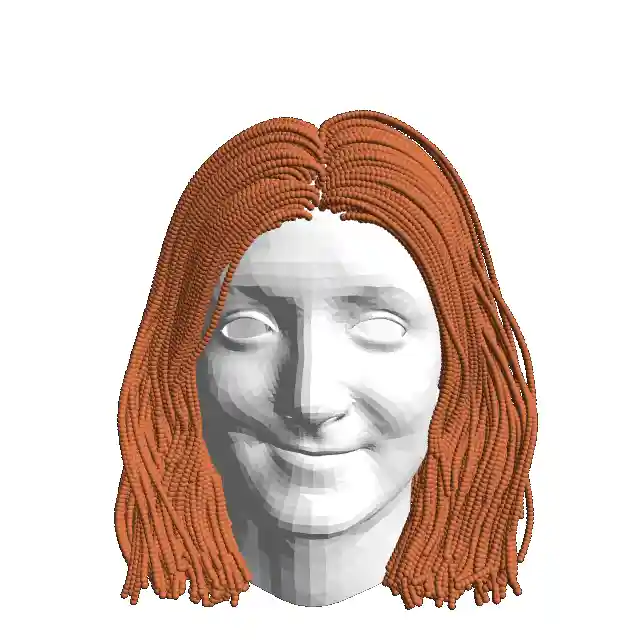
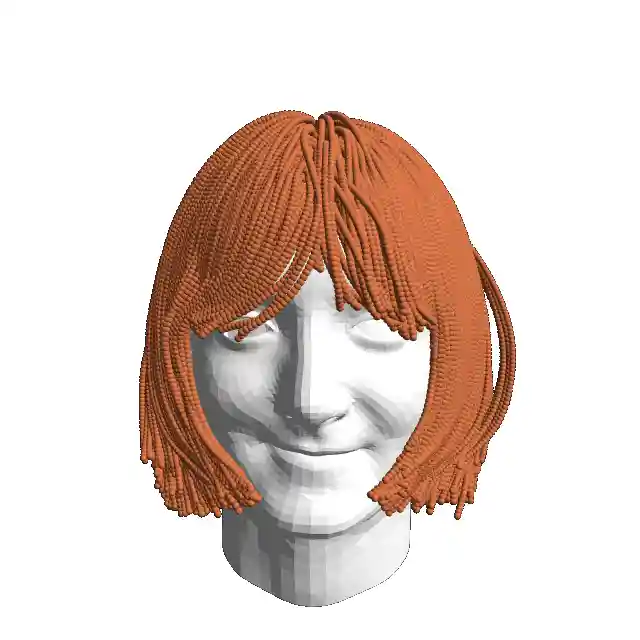
DYMO-Hair (Ours) on More Various Messy Cases
Goal
Goal
Goal

Goal
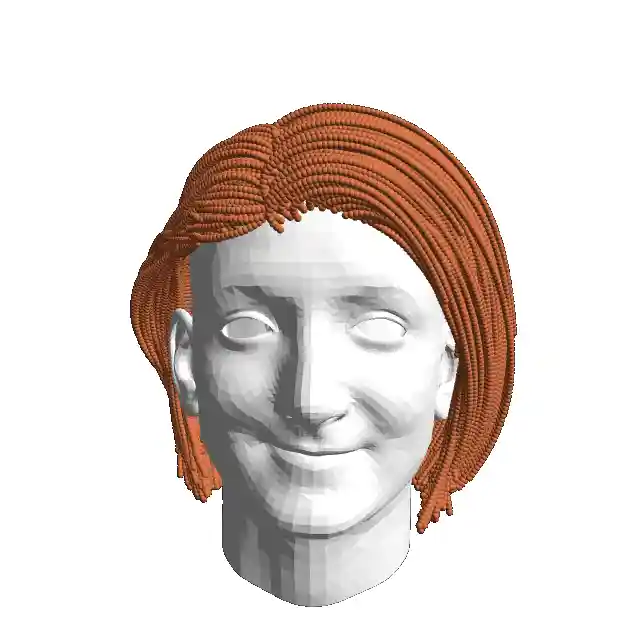
Goal
Goal
Key Takeaway
- DYMO-Hair successfully styles a wide range of unseen hairstyles with varying difficulty, surpassing both the state-of-the-art rule-based system and all model-based baselines.
- Compared to the state-of-the-art rule-based system, DYMO-Hair reduces the final geometric error by 22% and achieves a 42% higher absolute success rate on average.
- This highlights the benefit of incorporating a dynamics model and demonstrates the superior performance of our advanced model in boosting closed-loop manipulation at the system level.
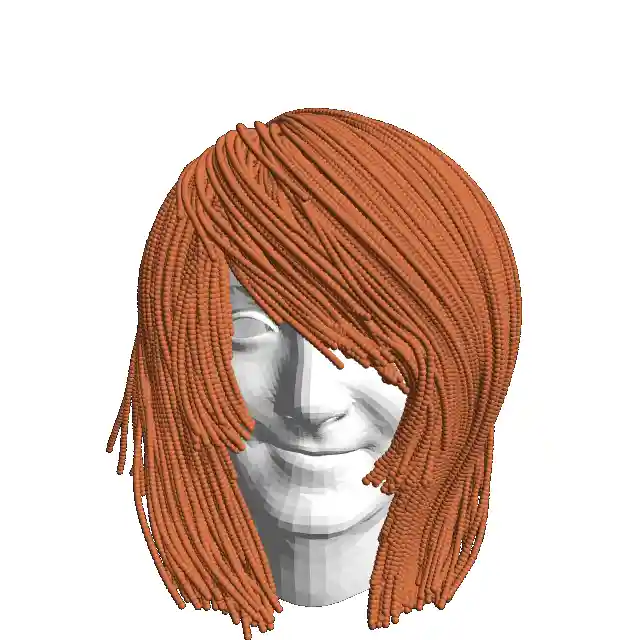
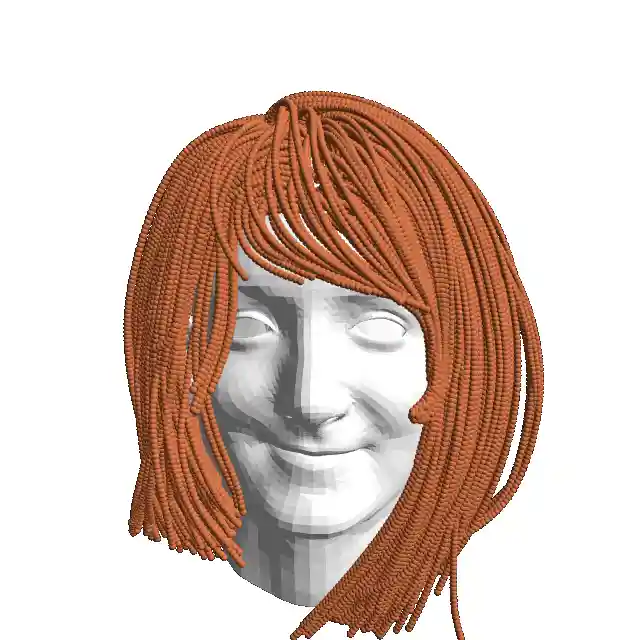
Hair Styling Real-world Tests on Wigs
Key Takeaway
- Real-world tests exhibit zero-shot transferability of DYMO-Hair to wigs, achieving consistent success on challenging unseen hairstyles where the state-of-the-art rule-based system fails.
- Compared to the state-of-the-art rule-based system, DYMO-Hair is more robust to environmental variations, generalizes across hair lengths, and can effectively capture spatially long-horizon goals.
Acknowledgements
We would like to thank Feiyu Zhu and John Z. Zhang for their valuable feedback and discussions. This work was supported by NSF IIS-2112633 and NSF Graduate Research Fellowship under Grant No. DGE2140739.
Contact
If you have any questions, please feel free to contact Chengyang Zhao.