
I am a Postdoctoral researcher in the AUTOLab at UC Berkeley, working with Prof. Ken Goldberg. Prior to joining UC Berkeley, I obtained my Ph.D. and M.S. degree from Texas A&M University, advised by Prof. Dezhen Song.
I design algorithmic frameworks that help robots move from theory to the real world—where uncertainty, complexity, and noise are the norm. My research aims to make robots more capable and resilient in unstructured environments, spanning applications in manipulation, outdoor navigation, and mobile manipulation. Recently, I’ve been exploring how task and motion planning, Vision-Language Models (VLMs), and 3D/4D reconstruction can come together to enable robots to perceive, reason, and act with greater autonomy—whether it’s grasping objects, navigating dynamic spaces, or modeling plants in natural settings.
news
selected publications
* indicates co-first author
-

Energy Efficient Planning for Repetitive Heterogeneous Tasks in Precision Agriculture
In IEEE International Conference on Robotics and Automation (ICRA), 2025
-
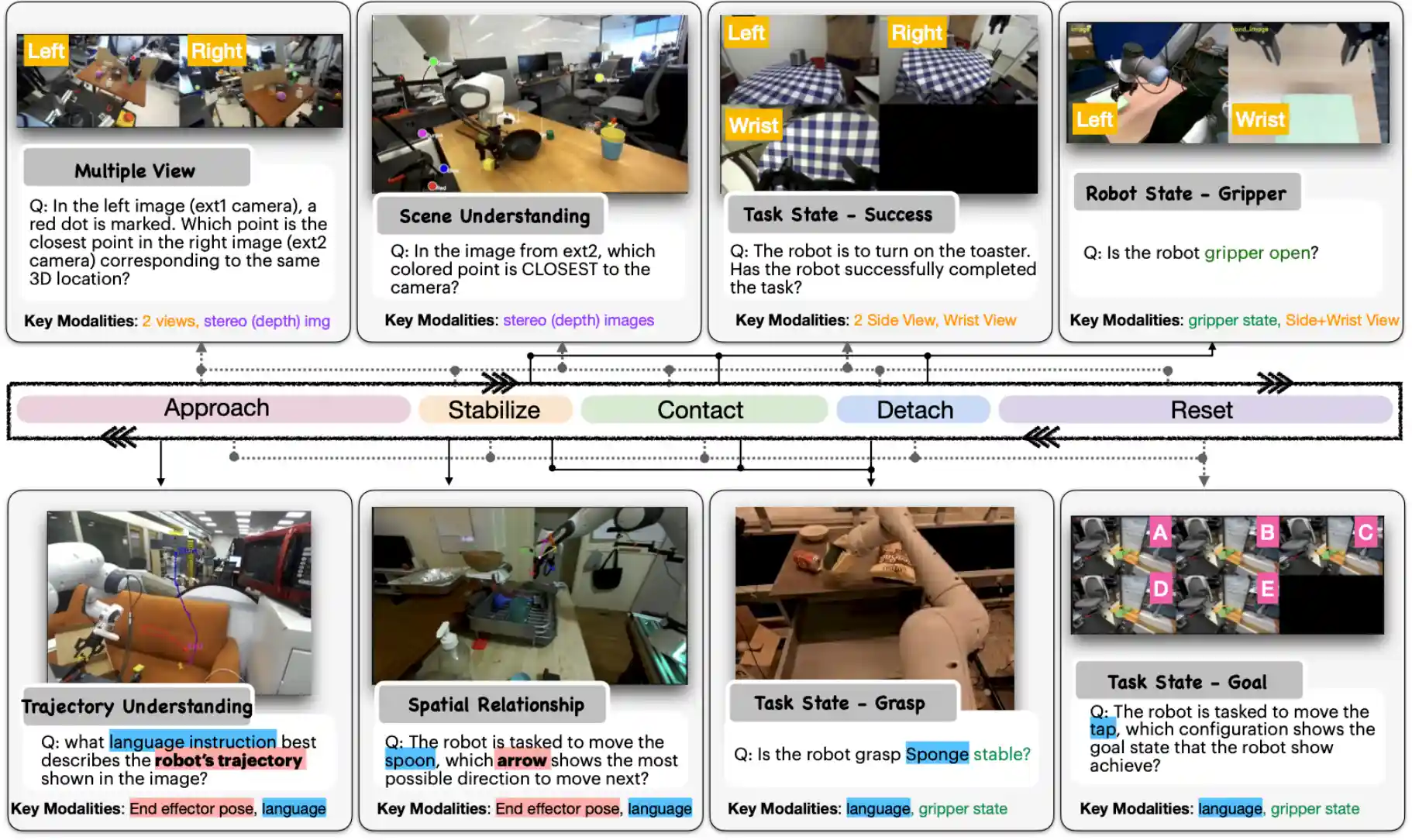
Robo2VLM: Visual Question Answering from Large-Scale In-the-Wild Robot Manipulation Datasets
Kaiyuan Chen*, Shuangyu Xie*, Zehan Ma, and Ken Goldberg
In Thirty-ninth Annual Conference on Neural Information Processing Systems (NeurIPS), 2025
Spotlight
-

Botanybot : Digital Twin Monitoring of Occluded and Underleaf Plant Structures with Gaussian Splats
Simeon Adebola, Chung Min Kim, Justin Kerr, Shuangyu Xie, Prithvi Akella, Jose Luis Susa Rincon, Eugen Solowjow, and Ken Goldberg
In IROS, 2025
-

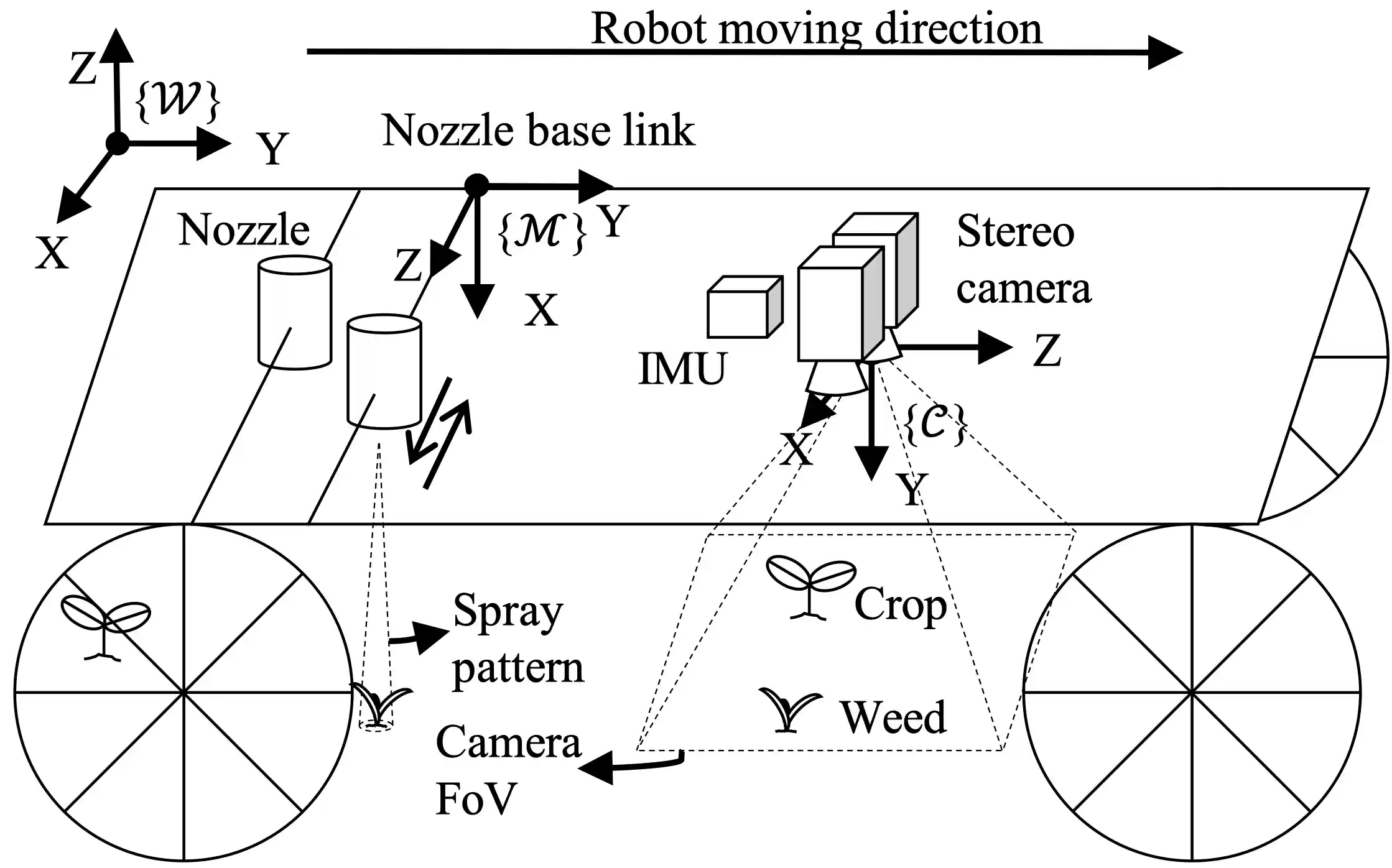
Coupled Active Perception and Manipulation Planning for a Mobile Manipulator in Precision Agriculture Applications
Shuangyu Xie, Chengsong Hu, Di Wang, Joe Johnson, Muthukumar Bagavathiannan, and Dezhen Song
International Conference on Robotics and Automation (ICRA), 2024
-
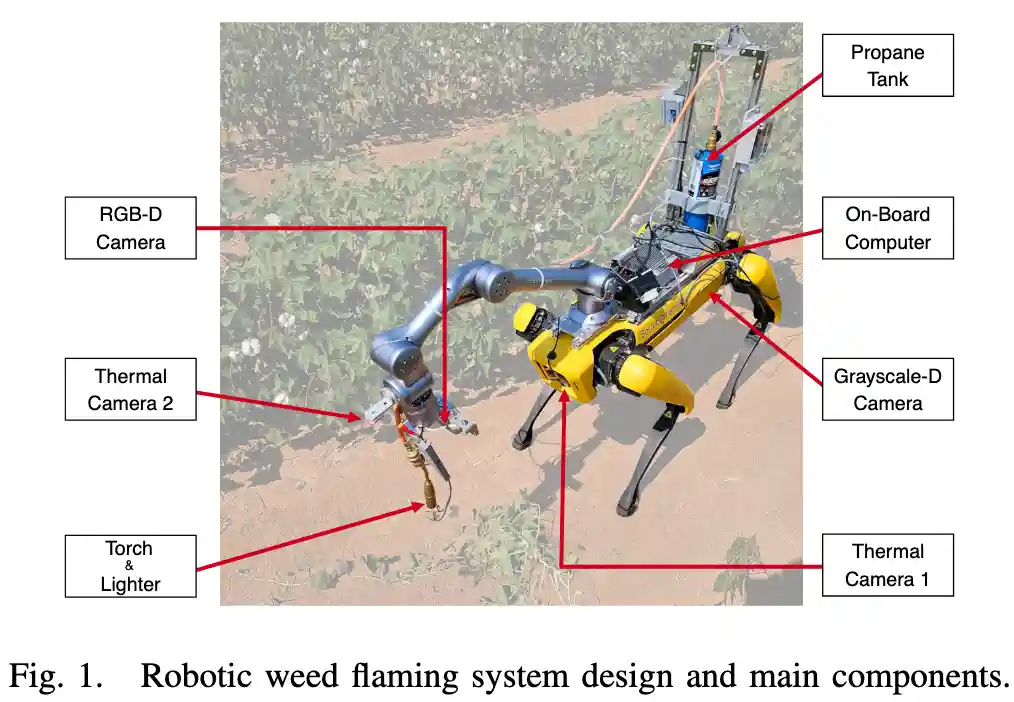
System and Algorithm for Robotic Weed Flaming Using a Quadruped Robot and a 6-Axis Manipulator
Di Wang, Chengsong Hu, Shuangyu Xie, Joe Johnson, Hojun Ji, Yingtao Jiang, Muthukumar Bagavathiannan, and Dezhen Song
International Conference on Intelligent Robots and Systems (IROS), 2024
-
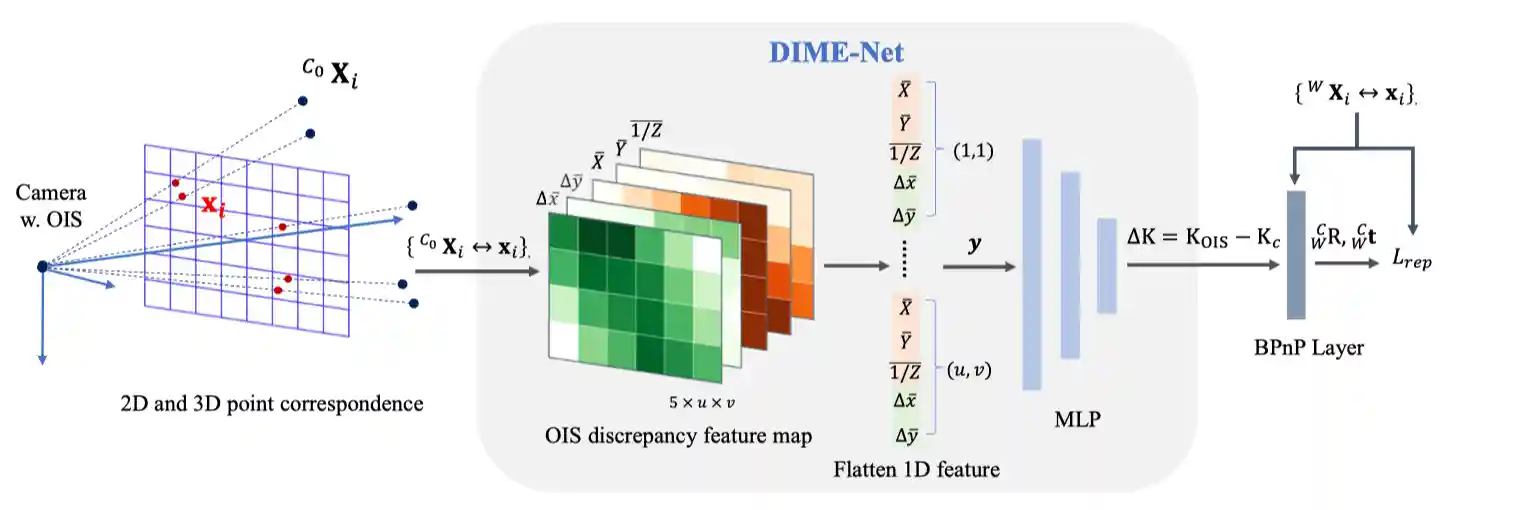
Dynamic Intrinsic Parameter Rectification Network for Cameras with Optical Image Stabilization in Desktop Augmented Reality Applications
Shuangyu Xie, Di Wang, Shu-Hao Yeh, Wei Yan, and Dezhen Song
IEEE International Conference on Automation Science and Engineering (CASE), 2024
-

A Pretouch Perception Algorithm for Object Material and Structure Mapping to Assist Grasp and Manipulation Using a DMDSM Sensor
Fengzhi Guo, Shuangyu Xie, Di Wang, Cheng Fang, Jun Zou, and Dezhen Song
International Conference on Intelligent Robots and Systems (IROS), 2023
-
Algorithm and System Development for Robotic Micro-Volume Herbicide Spray Towards Precision Weed Management
Chengsong Hu, Shuangyu Xie, Dezhen Song, J. Alex Thomasson, Robert G. Hardin IV, and Muthukumar Bagavathiannan
IEEE Robotics and Automation Letters, 2022
-
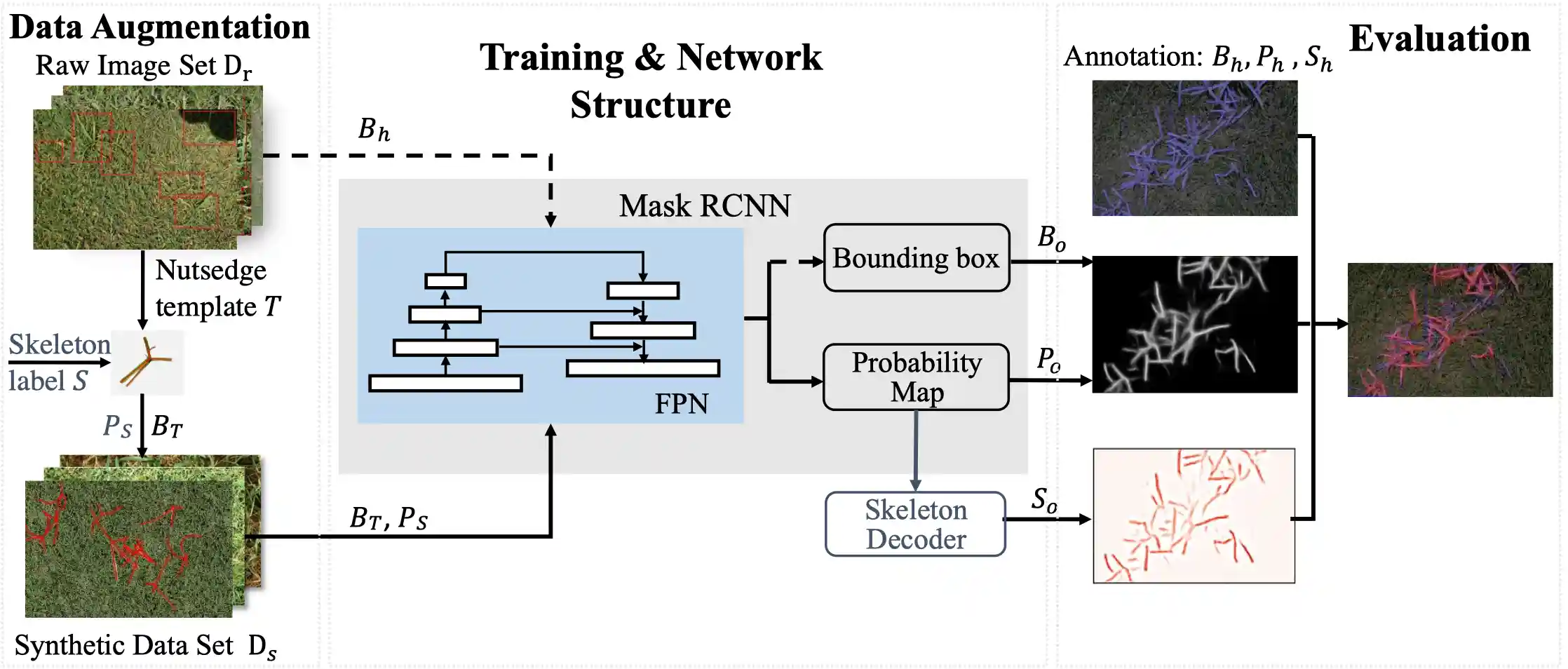
Toward Robotic Weed Control: Detection of Nutsedge Weed in Bermudagrass Turf Using Inaccurate and Insufficient Training Data
Shuangyu Xie, Chengsong Hu, Muthukumar Bagavathiannan, and Dezhen Song
IEEE Robotics and Automation Letters, 2021