Jimmy Wu

|
HoMeR: Learning In-the-Wild Mobile Manipulation via Hybrid Imitation and Whole‑Body Control
|

|
Vision in Action: Learning Active Perception from Human Demonstrations
|
|
Constraint-Preserving Data Generation for Visuomotor Policy Learning
|

|
Points2Plans: From Point Clouds to Long-Horizon Plans with Composable Relational Dynamics
|

|
TidyBot++: An Open-Source Holonomic Mobile Manipulator for Robot Learning
|

|
Consistency Policy: Accelerated Visuomotor Policies via Consistency Distillation
|

|
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
|

|
EquivAct: SIM(3)-Equivariant Visuomotor Policies beyond Rigid Object Manipulation
|

|
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
|

|
TidyBot: Personalized Robot Assistance with Large Language Models
|

|
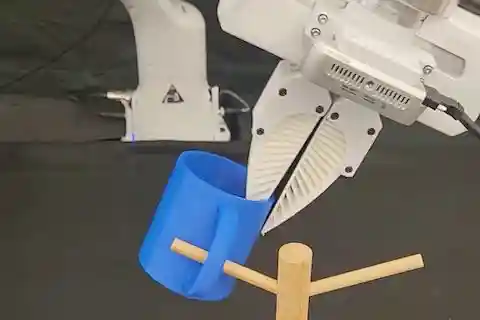
Learning Pneumatic Non-Prehensile Manipulation with a Mobile Blower
|

|
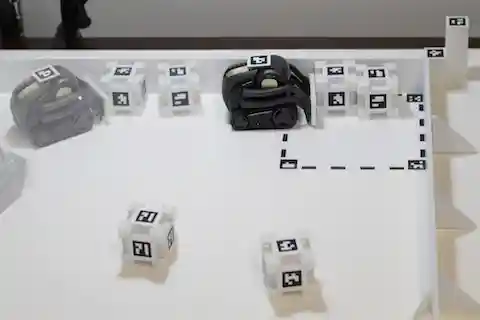
Spatial Intention Maps for Multi-Agent Mobile Manipulation
|
|
Spatial Action Maps for Mobile Manipulation
|

|
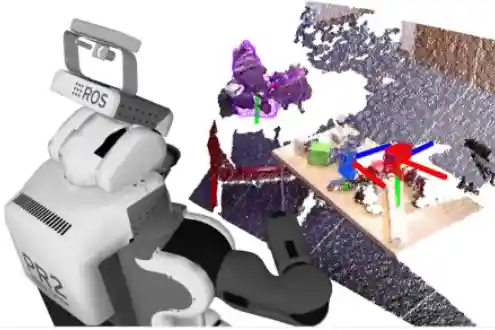
Real-Time Object Pose Estimation with Pose Interpreter Networks
|
|
SegICP: Integrated Deep Semantic Segmentation and Pose Estimation
|