Kevin Black
Selected Publications
Octo: An Open-Source Generalist Robot Policy
Octo Model Team: K. Black*, D. Ghosh*, H. Walke*, K. Pertsch*, O. Mees*, S. Dasari, J. Hejna, C. Xu, J. Luo, T. Kreiman, Y. L. Tan, D. Sadigh, C. Finn, S. Levine.
Robotics: Science and Systems (2024).
BridgeData V2: A Dataset for Robot Learning at Scale
H. Walke, K. Black, A. Lee, M. J. Kim, M. Du, C. Zheng, T. Zhao, P. Hansen-Estruch, Q. Vuong, A. He, V. Myers, K. Fang, C. Finn, S. Levine.
Conference on Robot Learning (2023).
Other Projects
An open-source foundation model for robotic manipulation. I also made the website :)

A lightweight dataloading library for video data, used in Octo

Generates synthetic training data for deep learning computer vision tasks using Blender

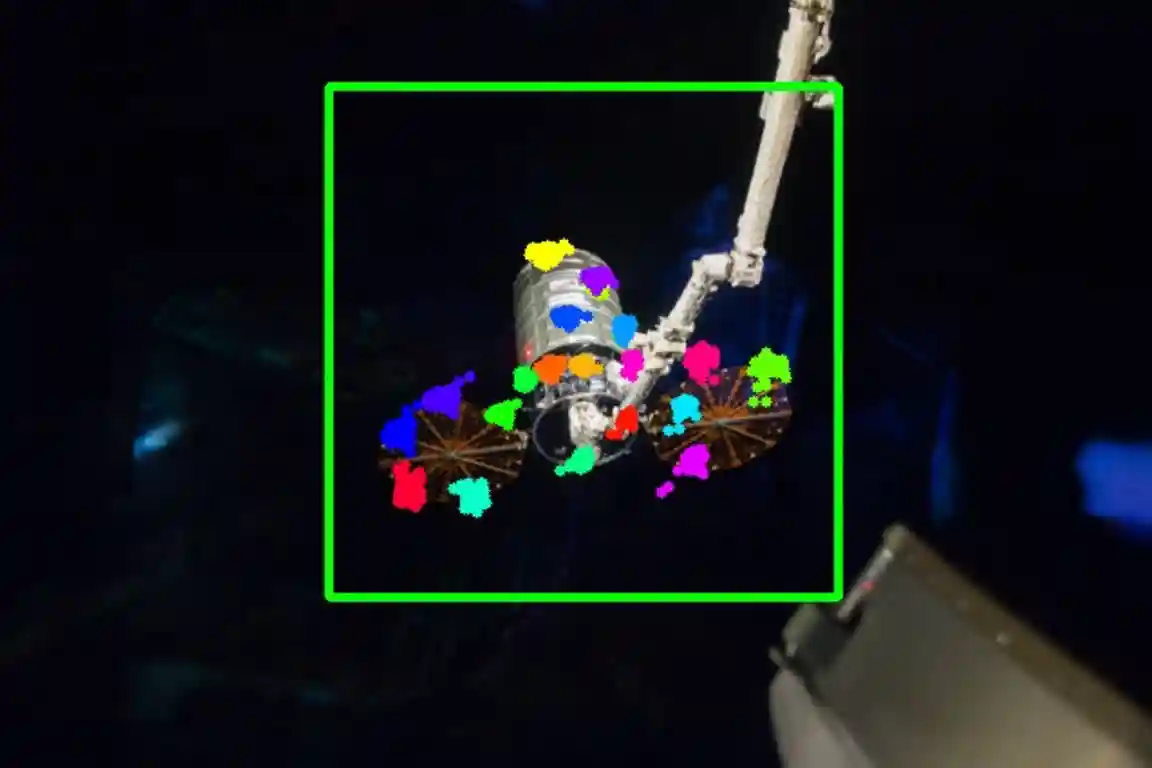
A simple web-based Object Pose Annotation Tool for manually annotating images with 6D pose information

A working quadcopter flight controller written in SystemVerilog and deployed to an FPGA
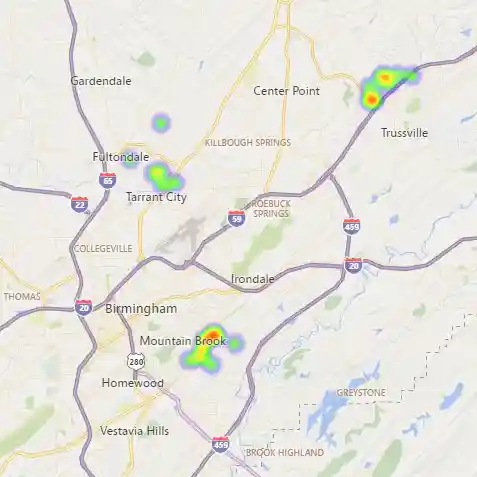
An automated 911 call handler intended for disaster relief scenarios that uses natural language processing to cluster calls by incident (HackMIT 2019)
A smart typing trainer for programmers that learns from the user in real time and targets more difficult patterns (HackDFW 2019)
Turns an image of a key into a working 3D-printed copy (HackTX 2018)

A nationals-winning device built for the Science Olympiad high school competition

A 32-bit microcontroller applet from my summer 2017 internship at Silicon Labs

A website and custom content management system created for my high school

An Android app allowing Austin ISD students to easily check their grades