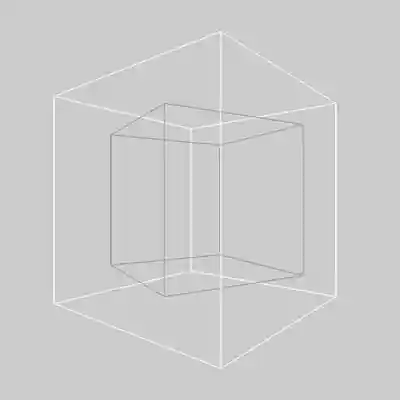
applyMatrix() / Reference
size(400, 400, P3D); noFill(); translate(200, 200, 0); rotateY(PI/6); stroke(153); box(140); // Set rotation angles float ct = cos(PI/9.0); float st = sin(PI/9.0); // Matrix for rotation around the Y axis applyMatrix( ct, 0.0, st, 0.0, 0.0, 1.0, 0.0, 0.0, -st, 0.0, ct, 0.0, 0.0, 0.0, 0.0, 1.0); stroke(255); box(200);