AI4CE Lab
The AI4CE lab (pronounced as “A-I-force”) at New York University conducts multidisciplinary use-inspired research to develop novel algorithms and systems for intelligent agents to accurately understand and efficiently interact with materials and humans in dynamic and unstructured environments. We aim to fundamentally advance Robotics and AI in areas such as localization, mapping, navigation, mobile manipulation, and scene understanding, to address infrastructure challenges on Earth and beyond, including construction robotics, manufacturing automation, and autonomous vehicles.
AI4CE Lab is part of the new NYU Center for Robotics and Embodied Intelligence!
Research Interests
- Robotics
- Computer Vision
- Machine Learning
- Artificial Intelligence
- Construction Automation
- Computing in Civil Engineering
News
- Our lab’s first spinoff startup Building Diagnostic Robotics (BDR) was founded in 2023!
- Our lab is featured on IEEE Spectrum together with other three NYU robotics teams!
- [12/2025] Inauguration of NYU Center for Robotics and Embodied Intelligence (CREO)! Dr. Feng is a co-director of the center.
- [10/2025] CoVision receives an Outstanding Paper Award in HiCV workshop, ICCV 2025! Congratulations to Chao, Juexiao and their collaborators.
- [10/2025] Research led by Ruixuan Zhang won the NYC Vision Zero Research Award! Congratulations to Ruixuan and his collaborators Zilin, Juexiao and Beichen.
- [09/2025] Dr. Feng will serve as Area Chair for CVPR 2026.
- [09/2025] Dr. Feng will serve as construction robotics track chair for ASCE i3CE 2026.
- [09/2025] Congratulations to Jing on being selected for MIT EECS Rising Stars 2025!
- [09/2025] Congratulations to our junior members for entering their PhD programs: Siqi Tan -> Oxford, Suozhi Huang -> Princeton, Shuzhen Li -> Princeton, Zitai Xu -> UM, Kairui -> Buffalo, Beichen Wang -> GMU, Jintong Li -> Rutgers, Xuhang He -> UC Merced, and Tim Guo -> CMU. Good luck on your future endeavors!
- [08/2025] Congratulations to Chao for passing his PhD defense! Watch the defense talk.
- [06/2025] CoVision will be presented at ICCV 2025 HiCV Workshop!
- [06/2025] EUVS, Garf and RAP are accepted at ICCV 2025! See you in Hawaii!
- [06/2025] SeeDo is accepted at IROS 2025! See you in Hangzhou!
- [06/2025] Jing is invited for a keynote speech at the SINT4CH workshop at CVPR 2025.
- [06/2025] Dr. Feng is invited for a keynote speech at the DriveX workshop at CVPR 2025.
- [02/2025] CityWalker is accepted by CVPR 2025.
- [01/2025] TF-VPR is accepted by RA-L and will be presented at ICRA 2025.
- [01/2025] Two papers (FusionSense, NYU-Event-VPR) are accepted by ICRA 2025.
- [11/2024] Congratulations to Yiming for passing his PhD defense! Watch the defense talk.
- [10/2024] Two papers (3DGM, MSG) accepted by NeurIPS 2024.
- [10/2024] Xinhao presented 3 papers (SSCBench, Occ4cast, Roofus) from our lab at IROS 2024 Abu Dhabi.
- [09/2024] Dr. Feng is serving as an area chair for CVPR 2025.
- [09/2024] Dr. Feng receives 2024 Tandon Faculty Award and now holds the title of Institute Associate Professor.
- [06/2024] Dr. Feng has received his tenure and promotion approval from NYU. Congratulations!
- [04/2024] Congratulations to our junior members for being accepted to PhD programs: Jiamu Bai -> Penn State PhD Fall'2023, Nobel Dang -> Clemson PhD Fall'2023, Nuo Chen -> UM Twin City PhD Fall'2024, Zonglin Lyu -> Utah PhD Fall'2024, Sizhe Wei -> GaTech PhD Fall'2024, Xinran Tang -> UCF PhD Fall'2024, Zhitao Li -> Lehigh PhD Fall'2024.
- [02/2024] Two papers accepted by CVPR 2024.
- [02/2024] Congratulations to Wenyu for successfully defending his PhD thesis! His defense talk is here.
- [01/2024] Three papers accepted by ICRA 2024.
- [12/2023] Congratulations to Yiming for winning the NVIDIA Scholarship! Read the news.
Current Team
Senior Members

Chen Feng
Principle Investigator (PI) of the AI4CE group. One of Chen’s most ambitious academic dream is to enable robots like Wall-E and Baymax which could help humanity.
Chen Feng
Associate Professor at NYU

Jing Zhang
Jing Zhang is a postdoctoral fellow. She received her B.E. in Wuhan University. Her research interest lies in 3D computer vision and the application of artificial intelligence in archaeology.
Jing Zhang
Postdoctoral Fellow

Yongqing Liang
Yongqing Liang is a postdoctoral researcher. He received his PhD degree in Computer Science and Engineering from Texas A&M University. His research interests are computer vision, computer graphics, and robotics.
Yongqing Liang
Postdoctoral Fellow

Xuchu Xu
Xuchu is a PhD student. His motto is “Stay hungry, Stay foolish” and wants to be a man from the future.
Xuchu Xu
Ph.D. Candidate in Mechanical Engineering

Hanwen Zhao
Hanwen is a PhD student. He received his B.S. from University of Colorado Boulder and M.S. from Columbia University. His research interests are Robotics and Artificial Intelligence.
Hanwen Zhao
Ph.D. Candidate in Mechanical Engineering

Anbang Yang
Anbang Yang is a PhD candidate in the AI4CE lab at New York University, focusing on developing visual navigation systems to assist visually impaired individuals. He holds a Master’s degree in Mechanical Engineering from New York University and a Bachelor’s degree from Dalian University of Technology. Anbang has experience as a software engineer, developing navigation systems and constructing 3D maps for indoor navigation. His research interests include visual localization, 3D reconstruction, and spatial reasoning.
Anbang Yang
Ph.D. Candidate in Mechanical Engineering

Ruixuan Zhang
Ruixuan is a Ph.D. student in Transportation at the Tandon School of Engineering, co-advised by Prof. Kaan Ozbay. His research focuses on machine learning and intelligent transportation systems, aiming to provide multi-modal (vision and language) solutions for safety and decision-making.
Ruixuan Zhang
Ph.D. Candidate in Transportation Engineering

Bilal Sher
Bilal has an MS in Civil Engineering from NYU, and a BSc. from the University of Calgary. He is passionate about using technologies such as computer vision and deep learning to solve civil engineering problems.
Bilal Sher
Founder and CEO of Building Diagnostic Robotics, Inc.

Diwei Sheng
Diwei is an Ph.D. student in computer science. His research interests are artificial intelligence and computer vision. He is doing research on visual place recognition.
Diwei Sheng
Ph.D. Candidate in Computer Science

Irving Fang
Irving is a Ph.D. student from the CSE department. He did his undergraduate at UC Berkeley majoring in Data Science and Math. His research interests lie at the intersection of robotics, vision, and machine learning.
Irving Fang
Ph.D. Candidate in CSE

Juexiao Zhang
Juexiao Zhang is a Ph.D. student at the Courant Institute majoring in Computer science. He obtained his BS in EE from Tsinghua University. He is interested in machine learning, especially building AI systems that can efficiently learn representations from multimodal signals.
Juexiao Zhang
Ph.D. Candidate in Computer Science

Sihang Li
Sihang Li is a Ph.D student in M.E in Tandon School of Engineering. He received his B.E. in Tongji University. His research interests are Robot Perception, autonomous driving and Machine Learning.
Sihang Li
Ph.D. candidate in Mechanical Engineering

Xinhao Liu
Xinhao is a Ph.D student in Computer Science. He received his B.Sc. degree from NYU and NYU Shanghai. His research interest is 3D perception and human-like navigation.
Xinhao Liu
Ph.D. Candidate in Computer Science

Anuj Doshi
My name is Anuj Doshi. I am passionate about working on computer vision problems. My interests are in microscopic object detection, multi-modal AI, and collaborative robotics. I earned my master’s in robotics and mechatronics from NYU and currently lead AI projects at Nanotronics Imaging.
Anuj Doshi
Ph.D. Student in Mechanical Engineering

Yuzhong Chen
Yuzhong Chen is a Ph.D student in Computer Science in Tandon School of Engineering. He received his B.Eng. from CUHK(SZ) and M.S. from NYU. He is interested in robot perception and mobile manipulation.
Yuzhong Chen
Ph.D. Student in Computer Science
Junior Members

Harsh Sutaria
Harsh co-leads the VIP Self Drive team. His research interests include representation learning, world models and planning.
Harsh Sutaria
M.S. in Computer Science

Hellen Luo
Hellen is an undergraduate student at Princeton University studying Computer Science with intended minors in Mathematics and Visual Arts.
Hellen Luo
A.B. in Computer Science

Luca Macesanu
I’m interested in mobile manipulation with a focus on long horizon task and motion planning.
Luca Macesanu
M.S. in Robotics

Prem Sukhadwala
Prem completed his M.S. in Robotics from Northeastern University and his interests lies at the intersection of hardware and software for Robotics and Embodied AI. He is an avid stargazer, aspiring guitarist and enjoys being outdoors in nature.
Prem Sukhadwala
Visiting Research Assistant

Zeyu Jiang
Zeyu is an MSCS student at NYU with research interests in 3D Computer Vision, Robotics and Generative Models.
Zeyu Jiang
M.S. in Computer Science

Zihan Liu
I am the co-lead of VIP Self Drive Team. During the spare time I enjoy playing Rubik’s Cubes.
Zihan Liu
Undergraduate in Computer Science and Mathematics

Yipeng Wang
Research interests lie in robot learning in manipulation & vision, and control theories. During my time at NYU, I am fortunate to actively participate in the research of Mobile Manipulator and Object Rearrangement Tasks at AI4CE Lab led by Prof. Chen Feng.
Yipeng Wang
B.S. in Electrical & Computer Engineering

James Jin
James majors in computer science and wishes to turn his research interests in computer vision into a PhD career. He believes in the value of serving the academics and enriching its open exchange of knowledge.
James Jin
B.S. in Computer Science

Celestino Martinez
I am currently pursuing a bachelors degree in Computer Engineering with a minor in Robotics. My interests include machine learning, deep learning, and robotics.
Celestino Martinez
B.S. in Computer Engineering

Jonah Kamat
Jonah is a computer engineering graduate and researcher in the AI4CE lab. His interests lie in computer vision, natural language processing, and 3D reconstruction.
Jonah Kamat
B.S. Computer Engineering

Idan Lau
I am currently pursuing a BS in Computer Science and a Minor in Mathematics at NYU Tandon School Of Engineering. My interests include Backend Programming, Data Science/Machine Learning and Computer Networking
Idan Lau
B.S. in Computer Science

Kevin Lee
Kevin Lee graduated with a Master of Science (M.Sc.) in Computer Science in 2024 from New York University, following his Bachelor of Science (B.Sc.) also in Computer Science (2023). While pursuing his studies, he actively contributed to research at Building Diagnostic Robotics, a New York University robotics startup. There, he focused on integrating deep learning with robotics to develop robust autonomous diagnostics systems. His research interests lie in deep learning, robotics, and signal processing.
Kevin Lee
M.S. in Computer Science

Wei-Heng Lin
I graduated from NYU Tandon with M.S. in Computer Science in 2024 and am currently working at BDR to develop ML solutions for building anomaly detection. My interest lies in solving real-life problems using Computer Vision and Reinforcement Learning.
Wei-Heng Lin
M.S. in Computer Science
Selected Publications
Recent Publications
Datasets
MARS
In collaboration with the self-driving company May Mobility, we present the MARS dataset which unifies scenarios that enable multiagent, multitraversal, and multimodal autonomous vehicle research.

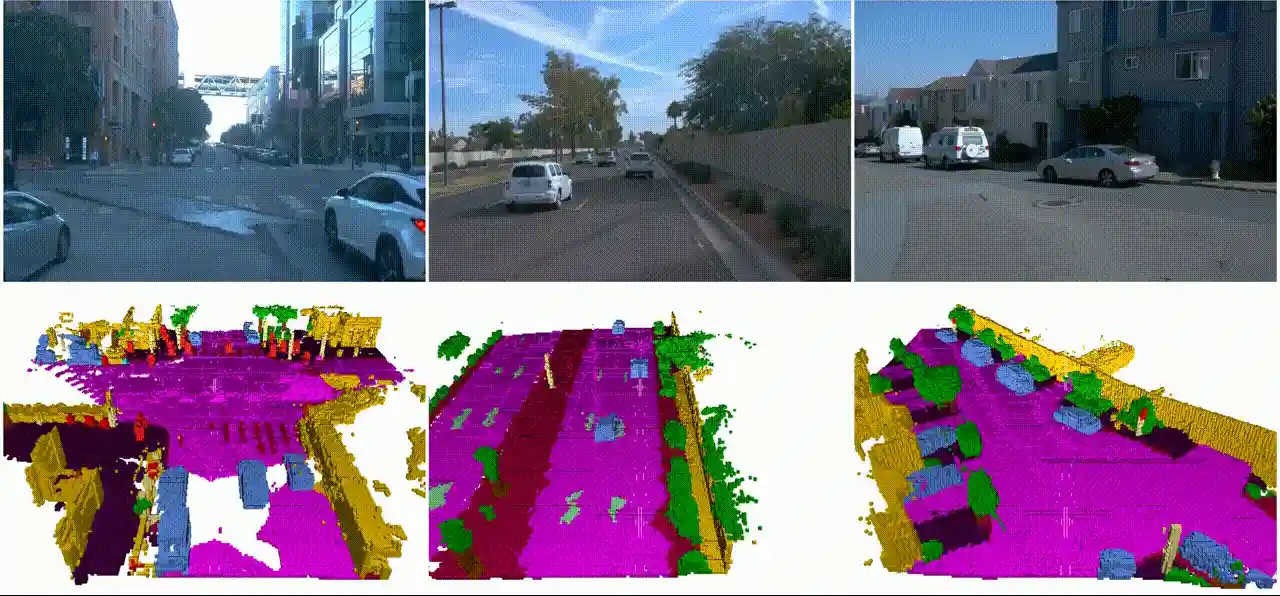
SSC Bench
Semantic scene completion (SSC) is crucial for holistic 3D scene understanding by jointly estimating semantics and geometry from sparse observations. We introduce SSCBench, a comprehensive benchmark that integrates scenes from widely-used automotive datasets (e.g., KITTI-360, nuScenes, and Waymo).
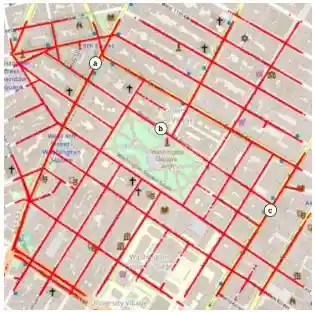
NYU-VPR
Composed of images recorded in Manhattan, New York from April 2016 to March 2017. The images were recorded by cameras installed on the front, back, and side parts of taxis with auto-exposure.
V2X-Sim
A Virtual Collaborative Perception Dataset and Benchmark for Autonomous Driving


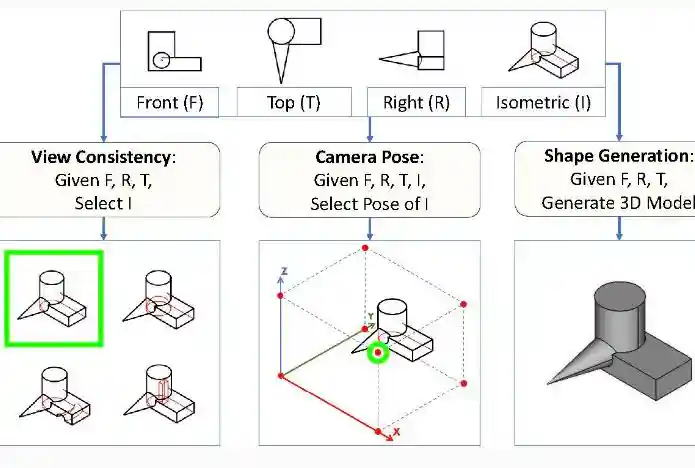
SPARE3D
Contains three types of 2D-3D reasoning tasks on view consistency, camera pose, and shape generation, with increasing difficulty
Teaching
We offer the following courses at NYU across multiple departments:
ROB-GY 6203 Robot Perception
Every Fall (since 2018) Graduate
ROB-UY 3203 Robot Vision
Every Spring (since 2020) Undergraduate
NYU Self-Drive (VIP)
Every Semester (since 2019)
Machine Learning for MAE/Robotics
2020 Summer Graduate
Emerging Information and Automation Technologies
2019 Spring Graduate
Funding Sources
Contact
- cfeng at nyu dot edu
- 4th floor, RH409, 6 MetroTech Center, New York University, NY 11201
- Email to book an appointment