Spherical Sliced-Wasserstein Embedding on Sphere — POT Python Optimal Transport 0.9.6 documentation
Note
Go to the end to download the full example code.
Here, we aim at transforming samples into a uniform distribution on the sphere by minimizing SSW:
\[\min_{x} SSW_2(\nu, \frac{1}{n}\sum_{i=1}^n \delta_{x_i})\]
where \(\nu=\mathrm{Unif}(S^{d-1})\).
# Author: Clément Bonet <clement.bonet@univ-ubs.fr> # # License: MIT License # sphinx_gallery_thumbnail_number = 3 import numpy as np import matplotlib.pyplot as pl import matplotlib.animation as animation import torch import torch.nn.functional as F import ot
Data generation
Plot data
def plot_sphere(ax): # Create a sphere using spherical coordinates phi = np.linspace(0, 2 * np.pi, 100) theta = np.linspace(0, np.pi, 100) phi, theta = np.meshgrid(phi, theta) # Compute the spherical coordinates X = np.sin(theta) * np.cos(phi) Y = np.sin(theta) * np.sin(phi) Z = np.cos(theta) # Plot the wireframe ax.plot_wireframe(X, Y, Z, color="gray", alpha=0.3) # plot the distributions pl.figure(1) ax = pl.axes(projection="3d") plot_sphere(ax) ax.scatter(x0[:, 0], x0[:, 1], x0[:, 2], label="Data samples", alpha=0.5) ax.set_title("Data distribution") ax.legend()
<matplotlib.legend.Legend object at 0x7f95b4b50910>
Gradient descent
x = x0.clone() x.requires_grad_(True) n_iter = 100 lr = 150 losses = [] xvisu = torch.zeros(n_iter, N, 3) for i in range(n_iter): sw = ot.sliced_wasserstein_sphere_unif(x, n_projections=500) grad_x = torch.autograd.grad(sw, x)[0] x = x - lr * grad_x / np.sqrt(i / 10 + 1) x = F.normalize(x, p=2, dim=1) losses.append(sw.item()) xvisu[i, :, :] = x.detach().clone() if i % 100 == 0: print("Iter: {:3d}, loss={}".format(i, losses[-1])) pl.figure(1) pl.semilogy(losses) pl.grid() pl.title("SSW") pl.xlabel("Iterations")
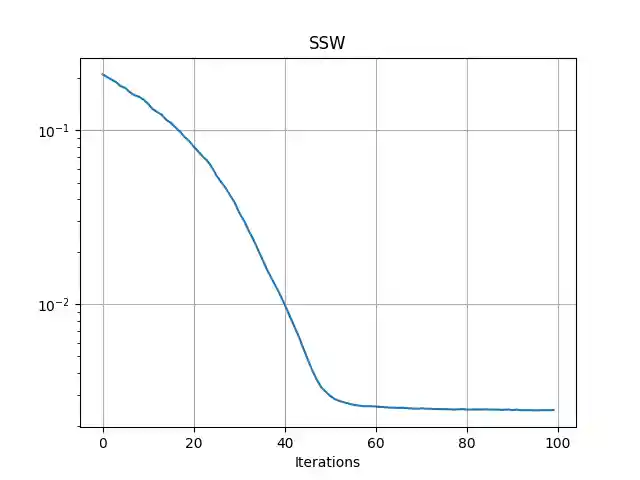
Iter: 0, loss=0.20994597673416138 Text(0.5, 23.52222222222222, 'Iterations')
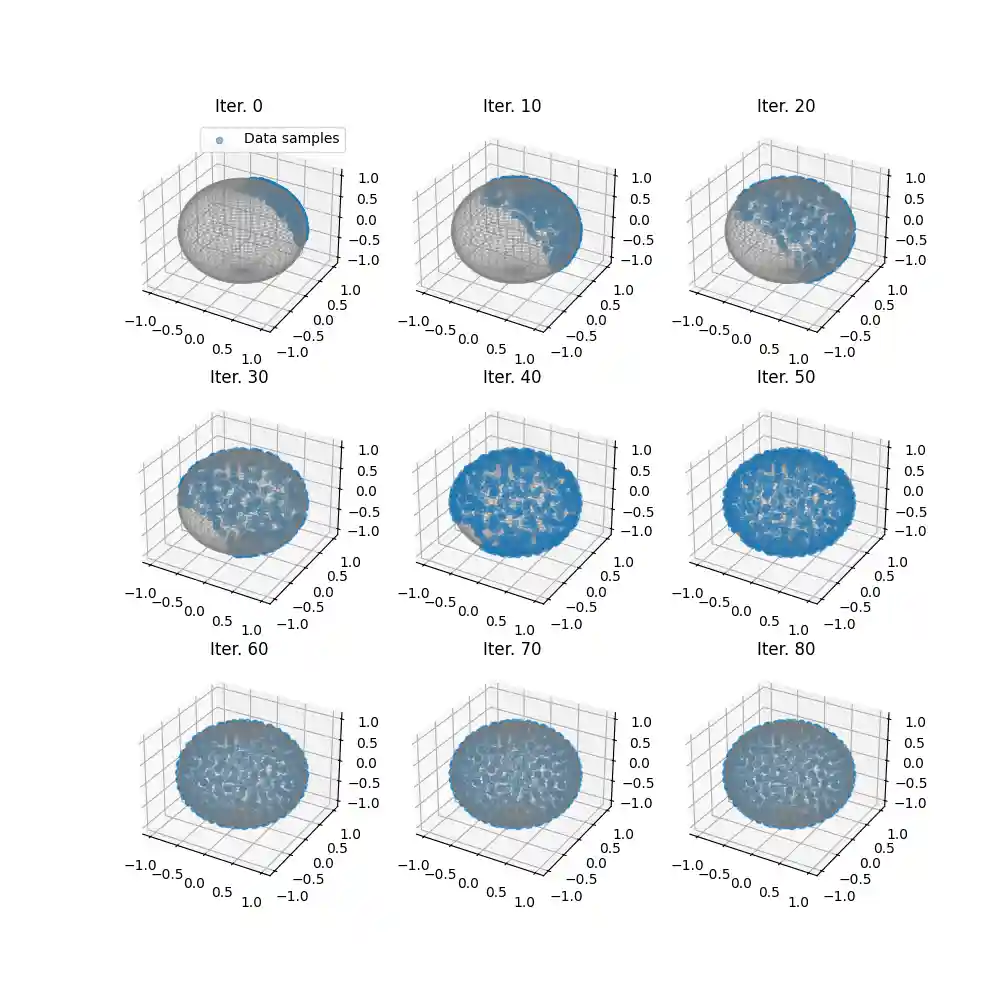
Plot trajectories of generated samples along iterations
ivisu = [0, 10, 20, 30, 40, 50, 60, 70, 80] fig = pl.figure(3, (10, 10)) for i in range(9): # pl.subplot(3, 3, i + 1) # ax = pl.axes(projection='3d') ax = fig.add_subplot(3, 3, i + 1, projection="3d") plot_sphere(ax) ax.scatter( xvisu[ivisu[i], :, 0], xvisu[ivisu[i], :, 1], xvisu[ivisu[i], :, 2], label="Data samples", alpha=0.5, ) ax.set_title("Iter. {}".format(ivisu[i])) # ax.axis("off") if i == 0: ax.legend()
Animate trajectories of generated samples along iteration
pl.figure(4, (8, 8)) def _update_plot(i): i = 3 * i pl.clf() ax = pl.axes(projection="3d") plot_sphere(ax) ax.scatter( xvisu[i, :, 0], xvisu[i, :, 1], xvisu[i, :, 2], label="Data samples$", alpha=0.5 ) ax.axis("off") ax.set_xlim((-1.5, 1.5)) ax.set_ylim((-1.5, 1.5)) ax.set_title("Iter. {}".format(i)) return 1 print(xvisu.shape) i = 0 ax = pl.axes(projection="3d") plot_sphere(ax) ax.scatter( xvisu[i, :, 0], xvisu[i, :, 1], xvisu[i, :, 2], label="Data samples from $G\#\mu_n$", alpha=0.5, ) ax.axis("off") ax.set_xlim((-1.5, 1.5)) ax.set_ylim((-1.5, 1.5)) ax.set_title("Iter. {}".format(ivisu[i])) ani = animation.FuncAnimation( pl.gcf(), _update_plot, n_iter // 5, interval=200, repeat_delay=2000 )
torch.Size([100, 500, 3])
Total running time of the script: (0 minutes 37.173 seconds)