Smooth and sparse OT example — POT Python Optimal Transport 0.9.6dev0 documentation
Note
Go to the end to download the full example code.
Note
Example updated in release: 0.9.1.
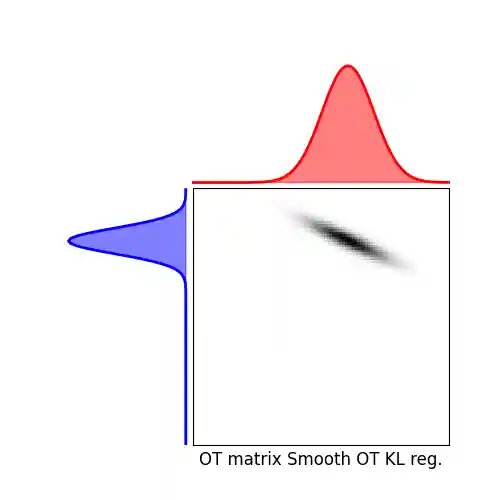
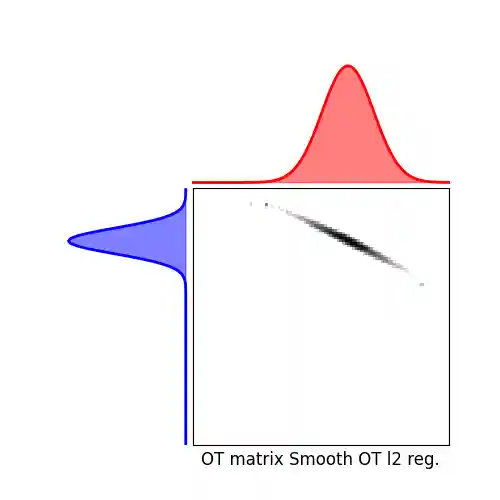
This example illustrates the computation of Smooth and Sparse (KL an L2 reg.) OT and sparsity-constrained OT, together with their visualizations.
# Author: Remi Flamary <remi.flamary@unice.fr> # # License: MIT License # sphinx_gallery_thumbnail_number = 5 import numpy as np import matplotlib.pylab as pl import ot import ot.plot from ot.datasets import make_1D_gauss as gauss
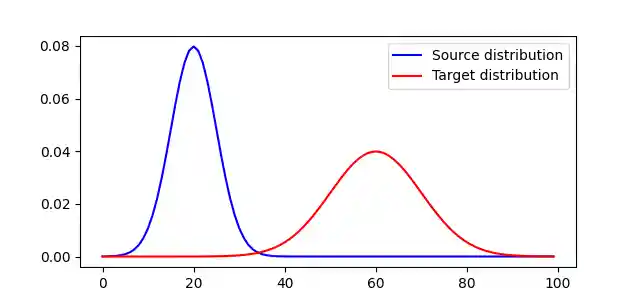
Generate data
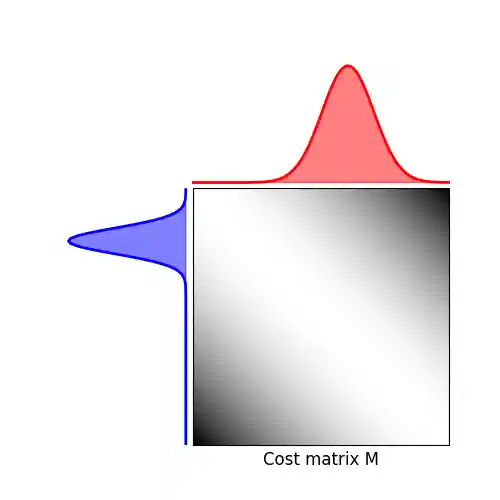
Plot distributions and loss matrix
pl.figure(1, figsize=(6.4, 3)) pl.plot(x, a, "b", label="Source distribution") pl.plot(x, b, "r", label="Target distribution") pl.legend()
<matplotlib.legend.Legend object at 0x7f6f3558cdc0>
(<Axes: >, <Axes: >, <Axes: >)
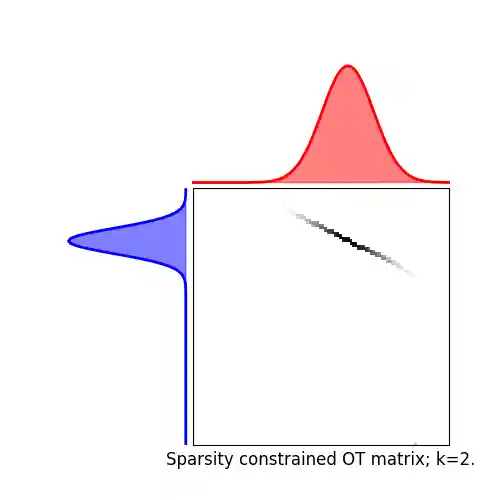
Solve Smooth OT
lambd = 1e-1 max_nz = 2 # two non-zero entries are permitted per column of the OT plan Gsc = ot.smooth.smooth_ot_dual( a, b, M, lambd, reg_type="sparsity_constrained", max_nz=max_nz ) pl.figure(5, figsize=(5, 5)) ot.plot.plot1D_mat(a, b, Gsc, "Sparsity constrained OT matrix; k=2.") pl.show()
Total running time of the script: (0 minutes 1.354 seconds)