Pete Florence's Home Page

RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control.
Anthony Brohan, Noah Brown, Justice Carbajal, Yevgen Chebotar, Xi Chen, Krzysztof Choromanski, Tianli Ding, Danny Driess, Avinava Dubey, Chelsea Finn,
, Chuyuan Fu, Montse Gonzalez Arenas, Keerthana Gopalakrishnan, Kehang Han, Karol Hausman, Alexander Herzog, Jasmine Hsu, Brian Ichter, Alex Irpan, Nikhil Joshi, Ryan Julian, Dmitry Kalashnikov, Yuheng Kuang, Isabel Leal, Lisa Lee, Tsang-Wei Edward Lee, Sergey Levine, Yao Lu, Henryk Michalewski, Igor Mordatch, Karl Pertsch, Kanishka Rao, Krista Reymann, Michael Ryoo, Grecia Salazar, Pannag Sanketi, Pierre Sermanet, Jaspiar Singh, Anikait Singh, Radu Soricut, Huong Tran, Vincent Vanhoucke, Quan Vuong, Ayzaan Wahid, Stefan Welker, Paul Wohlhart, Jialin Wu, Fei Xia, Ted Xiao, Peng Xu, Sichun Xu, Tianhe Yu, Brianna Zitkovich.
[ website with videos ]
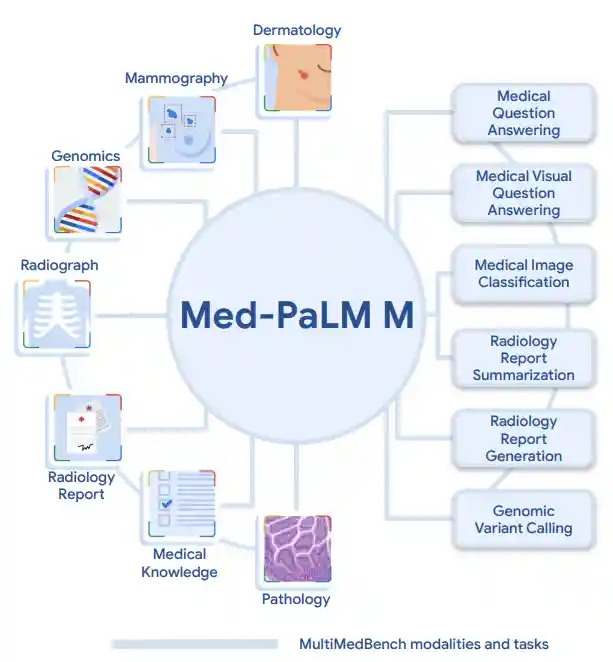
Towards Generalist Biomedical AI.
Tao Tu, Shekoofeh Azizi, Danny Driess, Mike Schaekermann, Mohamed Amin, Pi-Chuan Chang, Andrew Carroll, Chuck Lau, Ryutaro Tanno, Ira Ktena, Basil Mustafa, Aakanksha Chowdhery, Yun Liu, Simon Kornblith, David Fleet, Philip Mansfield, Sushant Prakash, Renee Wong, Sunny Virmani, Christopher Semturs, S Sara Mahdavi, Bradley Green, Ewa Dominowska, Blaise Aguera y Arcas, Joelle Barral, Dale Webster, Greg S. Corrado, Yossi Matias, Karan Singhal,
, Alan Karthikesalingam, Vivek Natarajan.
[ pdf ]

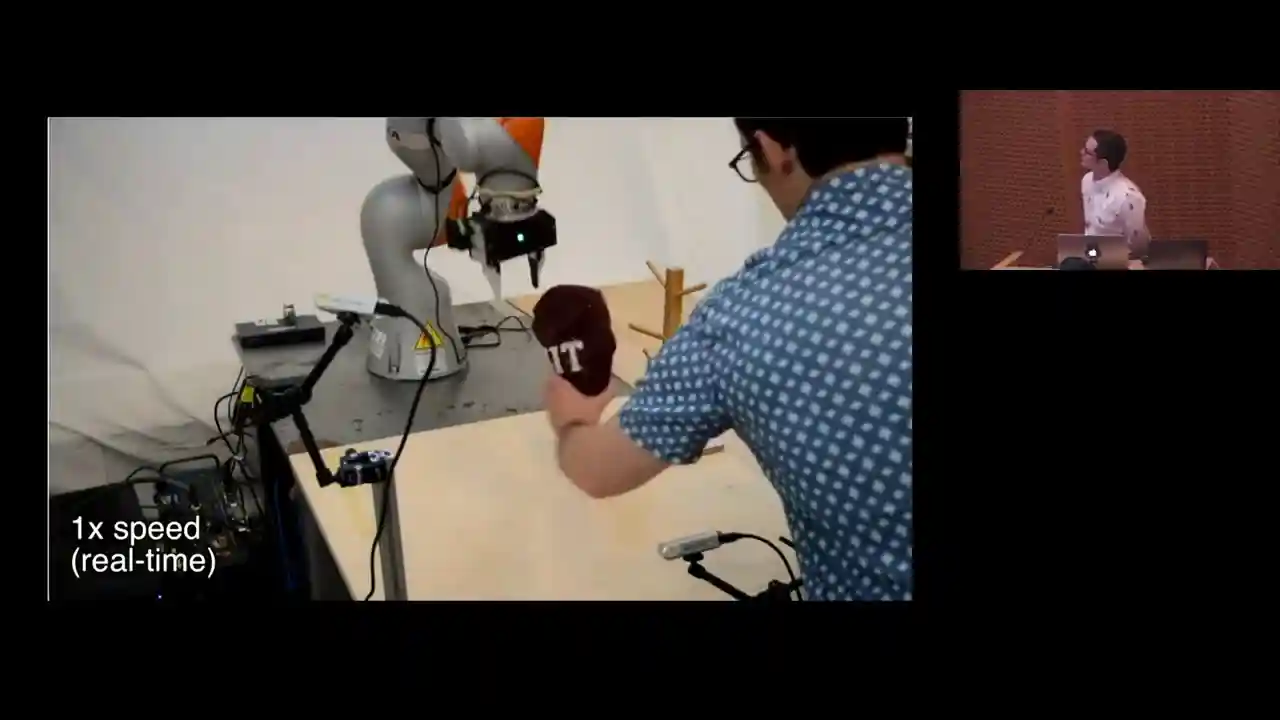
Scaling Up and Distilling Down: Language-Guided Robot Skill Acquisition.
Huy Ha,
, Shuran Song.
[ website with videos and code ]

Large Language Models as General Pattern Machines.
Suvir Mirchandani, Fei Xia,
, Brian Ichter, Danny Driess, Montserrat Gonzalez Arenas, Kanishka Rao, Dorsa Sadigh, Andy Zeng.
[ website with videos and code ]
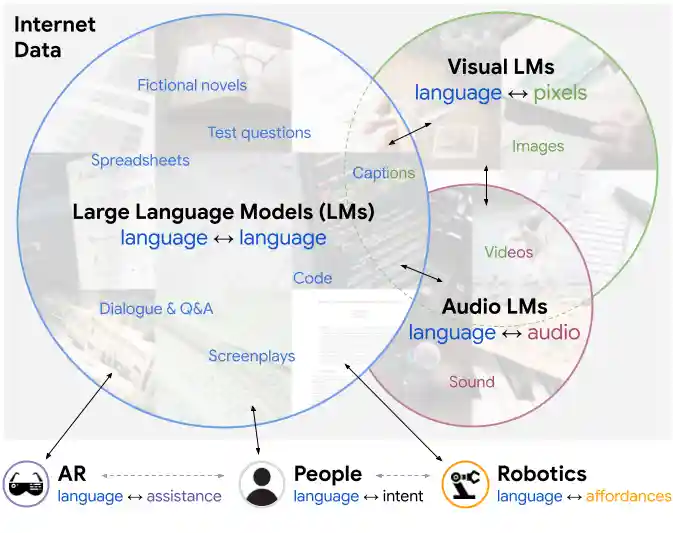
PaLM-E: An Embodied Multimodal Language Model.
Danny Driess, Fei Xia, Mehdi S. M. Sajjadi, Corey Lynch, Aakanksha Chowdhery, Brian Ichter, Ayzaan Wahid, Jonathan Tompson, Quan Vuong, Tianhe Yu, Wenlong Huang, Yevgen Chebotar, Pierre Sermanet, Daniel Duckworth, Sergey Levine, Vincent Vanhoucke, Karol Hausman, Marc Toussaint, Klaus Greff, Andy Zeng, Igor Mordatch,
.
[ website with videos ]
RoboPianist: A Benchmark for High-Dimensional Robot Control.
Kevin Zakka, Laura Smith, Nimrod Gileadi, Taylor Howell, Xue Bin Peng, Sumeet Singh, Yuval Tassa,
, Andy Zeng, Pieter Abbeel.
[ website with code and videos ]
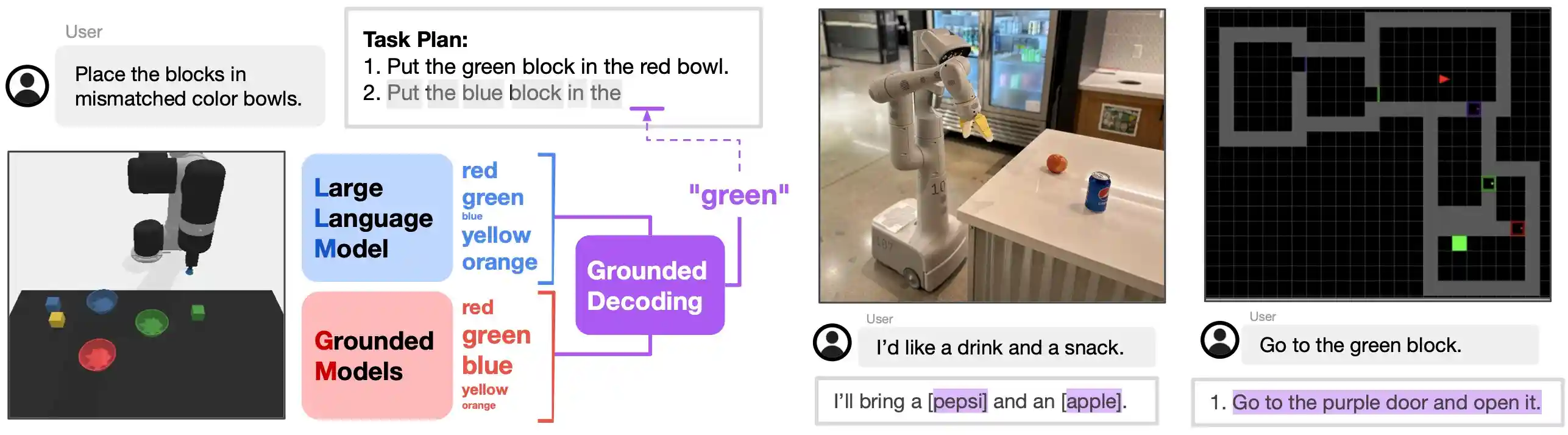
Grounded Decoding: Guiding Text Generation with Grounded Models for Robot Control.
Wenlong Huang, Fei Xia, Dhruv Shah, Danny Driess, Andy Zeng, Yao Lu,
, Igor Mordatch, Sergey Levine, Karol Hausman, Brian Ichter.
[ website with videos ]
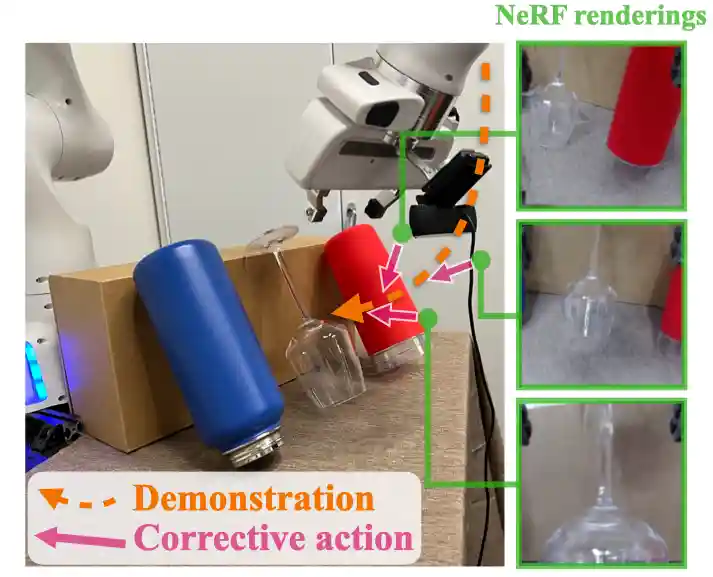
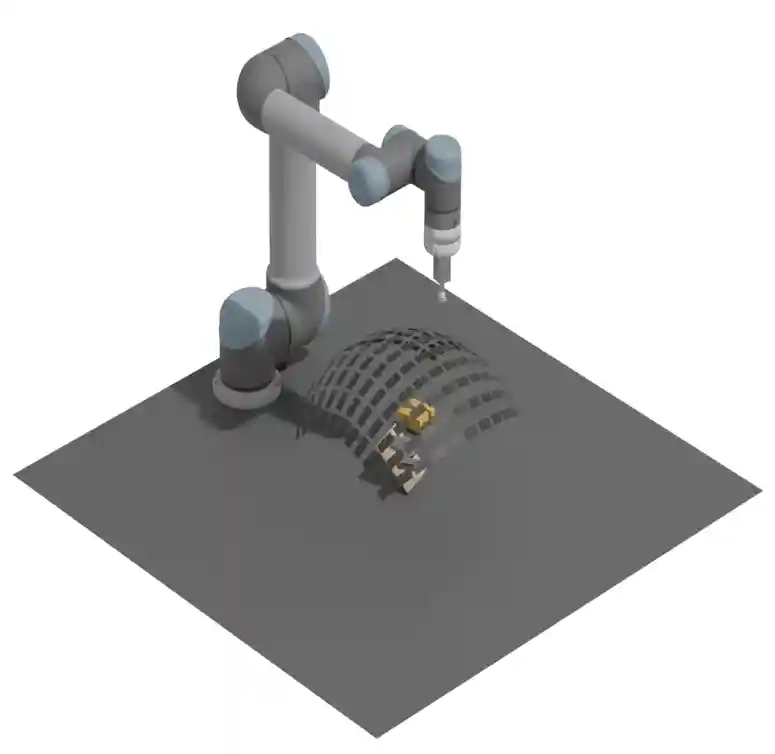
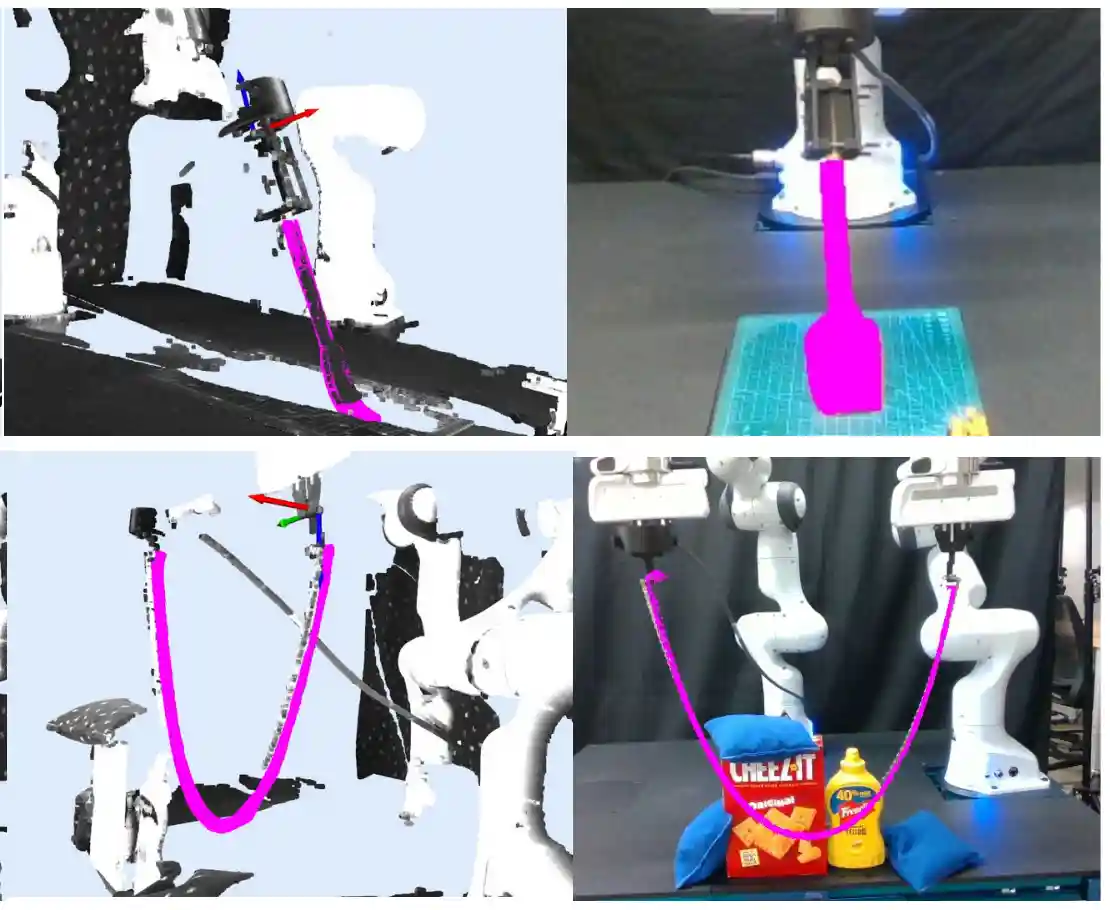
NeRF in the Palm of Your Hand: Corrective Augmentation for Robotics via Novel-View Synthesis.
Allan Zhou, Moo Jin Kim, Lirui Wang,
, Chelsea Finn. CVPR 2023.
[ website with videos ]
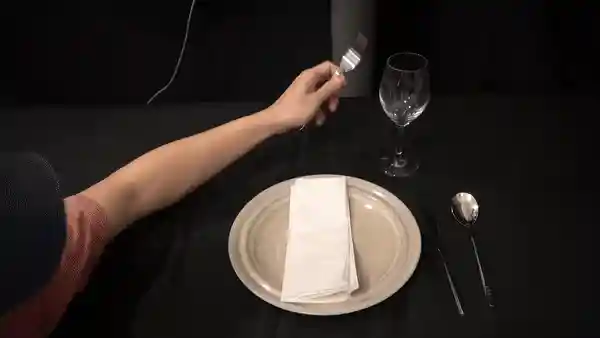
Interactive Language: Talking to Robots in Real Time.
Corey Lynch, Ayzaan Wahid, Jonathan Tompson, Tianli Ding, James Betker, Robert Baruch, Travis Armstrong,
. RA-L 2023.
[ website with code and videos ]
Single-Level Differentiable Contact Simulation.
Simon Le Cleac'h, Mac Schwager, Zachary Manchester, Vikas Sindhwani,
, Sumeet Singh. RA-L 2023.
[ pdf ]

Code as Policies: Language Model Programs for Embodied Control.
Jacky Liang, Wenlong Huang, Fei Xia, Peng Xu, Karol Hausman, Brian Ichter,
, Andy Zeng. ICRA 2023.
[ website with code and videos ]
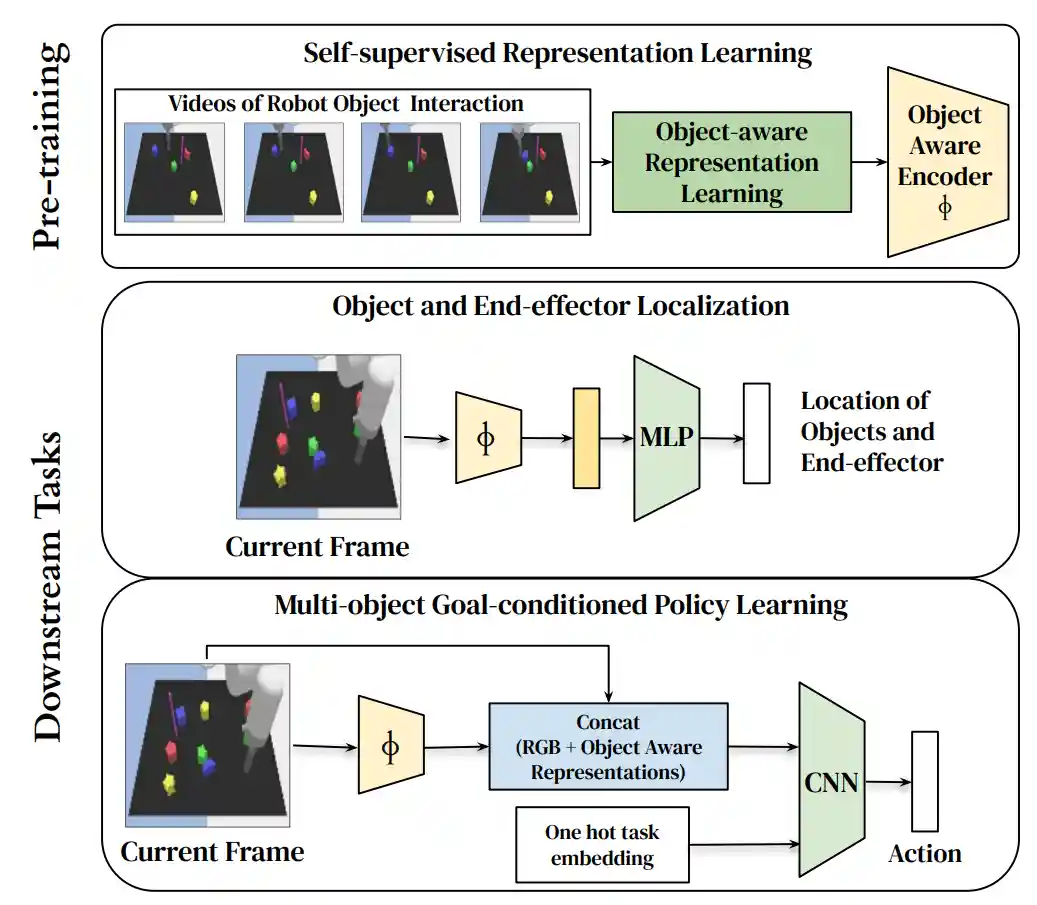
Visuomotor Control in Multi-Object Scenes Using Object-Aware Representations.
Negin Heravi, Ayzaan Wahid, Corey Lynch,
, Travis Armstrong, Jonathan Tompson, Pierre Sermanet, Jeannette Bohg, Debidatta Dwibedi. ICRA 2023.
[ pdf ]
Socratic Models: Composing Zero-Shot Multimodal Reasoning with Language.
Andy Zeng, Maria Attarian, Brian Ichter, Krzysztof Choromanski, Adrian Wong, Stefan Welker, Federico
Tombari, Aveek Purohit, Michael Ryoo, Vikas Sindhwani, Johnny Lee, Vincent
Vanhoucke,
. ICLR 2023.
[ pdf ] [ website with code and videos ]
VIRDO++: Real-World, Visuo-tactile Dynamics and Perception of Deformable Objects.
Youngsun Wi, Andy Zeng,
, Nima Fazeli. CoRL 2022.
[ pdf ] [ website with code and videos ]
Inner Monologue: Embodied Reasoning through Planning with Language Models.
Wenlong Huang*, Fei Xia*, Ted Xiao*, Harris Chan, Jacky Liang,
,
Andy Zeng, Jonathan Tompson, Igor Mordatch, Yevgen Chebotar, Pierre Sermanet,
Noah Brown, Tomas Jackson, Linda Luu, Sergey Levine, Karol Hausman, Brian Ichter. CoRL 2022.
[ pdf ] [ website with code and videos ]
Reinforcement Learning with Neural Radiance Fields.
Danny Driess, Ingmar Schubert,
, Yunzhu Li, Marc Toussaint. NeurIPS 2022.
[ pdf ] [ website with code and videos ]
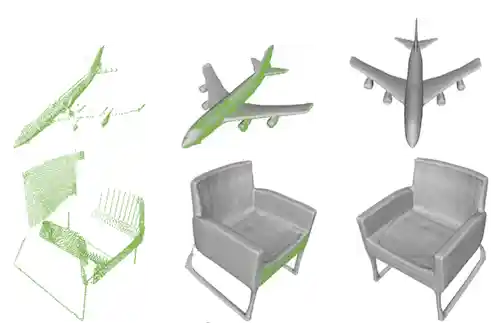
NeRF-Supervision: Learning Dense Object Descriptors from Neural Radiance Fields.
Lin Yen-Chen,
, Jonathan T. Barron, Tsung-Yi Lin, Alberto Rodriguez, Phillip Isola. ICRA 2022.
[ pdf ] [ website with code and videos ]

VIRDO: Visio-tactile Implicit Representations of Deformable Objects.
Youngsun Wi,
, Andy Zeng, Nima Fazeli. ICRA 2022.
[ pdf ]
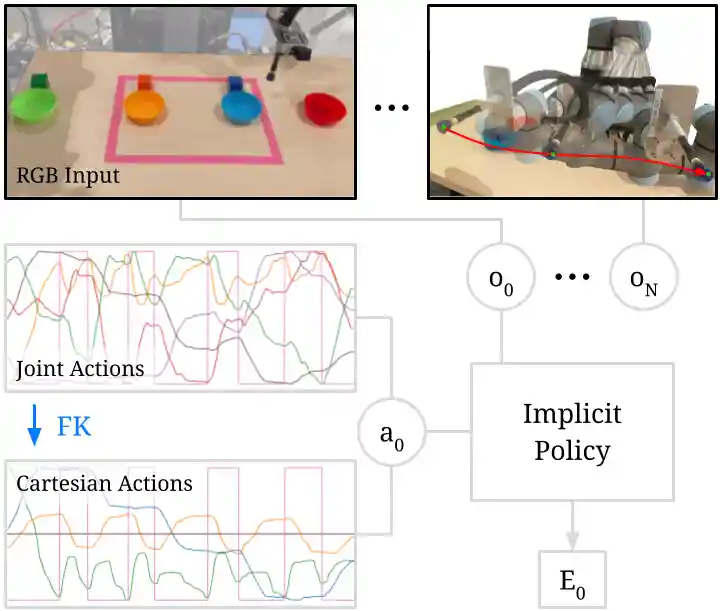
Implicit Kinematic Policies: Unifying Joint and Cartesian Action Spaces in End-to-End Robot Learning.
Aditya Ganapathi,
, Jake Varley, Kaylee Burns, Ken Goldberg, Andy Zeng. ICRA 2022.
[ pdf ]
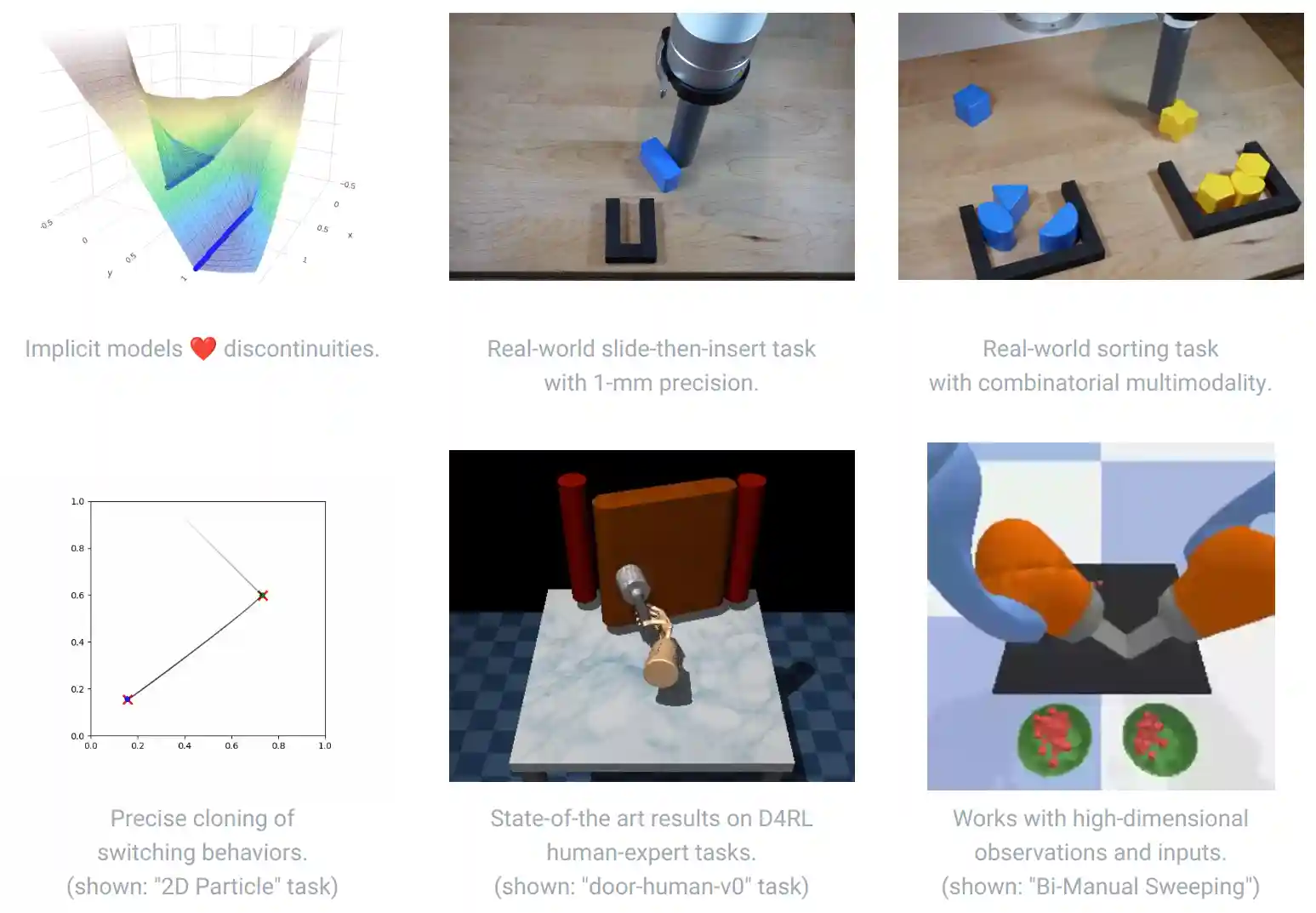
Implicit Behavioral Cloning.
Pete Florence, Corey Lynch, Andy Zeng, Oscar Ramirez, Ayzaan Wahid, Laura Downs, Adrian Wong, Johnny Lee, Igor Mordatch, Jonathan Tompson. CoRL 2021.
[ pdf ] [ code ] [ site with video ] [ blog post ]
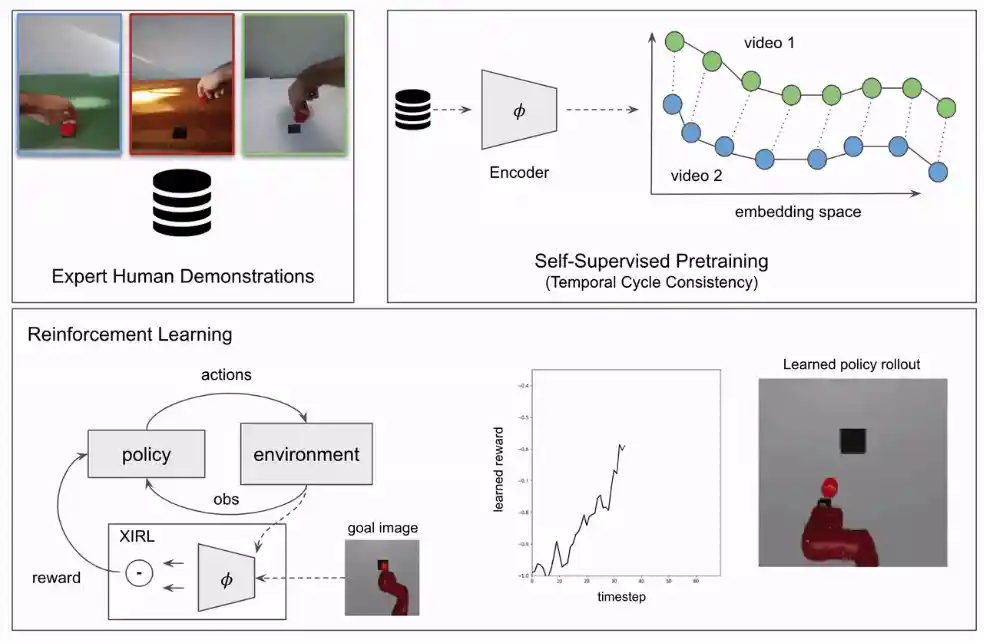
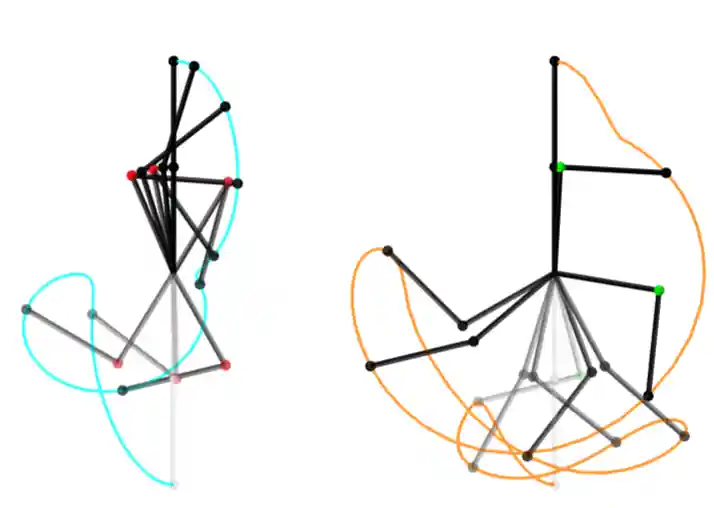
XIRL: Cross-embodiment Inverse Reinforcement Learning.
Kevin Zakka, Andy Zeng,
, Jonathan Tompson, Jeannette Bohg, Debdidatta Dwibedi. CoRL 2021.
[ pdf ] [ code ] [ site with video ]
★ Best Paper Finalist, CoRL 2021
★ Oral Presentation, CoRL 2021
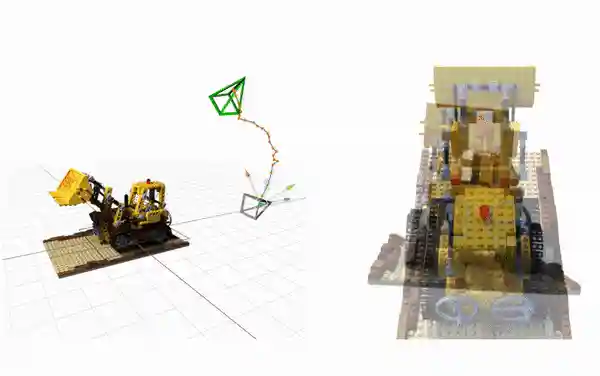
iNeRF: Inverting Neural Radiance Fields for Pose Estimation.
Yen-Chen Lin,
, Jonathan T. Barron, Alberto Rodriguez, Phillip Isola, Tsung-Yi Lin. IROS 2021.
[ pdf ] [ site with video ]
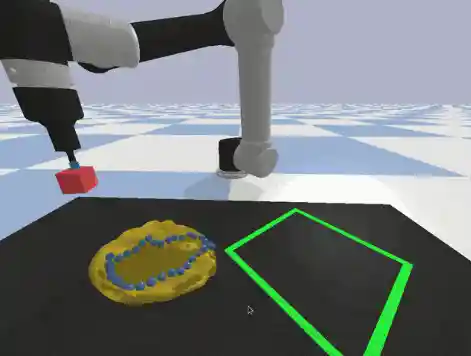
Learning to Rearrange Deformable Cables, Fabrics, and Bags with Goal-Conditioned Transporter Networks.
Daniel Seita,
, Jonathan Tompson, Erwin Coumans, Vikas Sindhwani, Ken Goldberg, Andy Zeng. ICRA 2021.
[ pdf ] [ site with video ]

Transporter Networks: Rearranging the Visual World for Robotic Manipulation.
Andy Zeng,
, Jonathan Tompson, Stefan Welker, Jonathan Chien, Maria Attarian, Travis Armstrong, Ivan Krasin, Dan Duong, Vikas Sindhwani, Johnny Lee. CoRL 2020.
[ pdf ] [ site with videos ]
★ Best Presentation Finalist, CoRL 2020
★ Oral Presentation, CoRL 2020

Keypoints into the Future: Self-Supervised Correspondence in Model-Based Reinforcement Learning.
Lucas Manuelli, Yunzhu Li,
, Russ Tedrake. CoRL 2020.
[ pdf ] [ site with video ]
Dense Visual Learning for Robot Manipulation.
Peter Florence. PhD thesis, Massachusetts Institute of Technology, September 2019.
[ pdf ] [ presentation video ]



Dense Object Nets: Learning Dense Visual Object Descriptors By and For Robotic Manipulation.
Peter R. Florence*, Lucas Manuelli*, and Russ Tedrake. CoRL 2018.
[ pdf ] [ video ] [ code ]
★ Best Paper Award, CoRL 2018
★ Best Technical Paper, 2018 Amazon Robotics Best Paper Awards in Manipulation
Press: [ WIRED ] [ CNN ] [ Newsweek ] [ Engadget ] [ VentureBeat ] [ more ]

LabelFusion: A Pipeline for Generating Ground Truth Labels for Real RGBD Data of Cluttered Scenes.
Pat Marion*,
, Lucas Manuelli*, and Russ Tedrake. ICRA 2018. [ website with code, video, paper ]
★ Finalist, Best Vision Paper Award, ICRA 2018
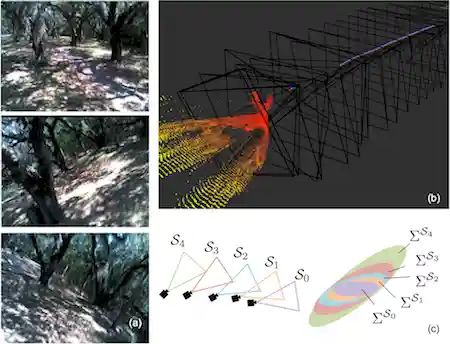

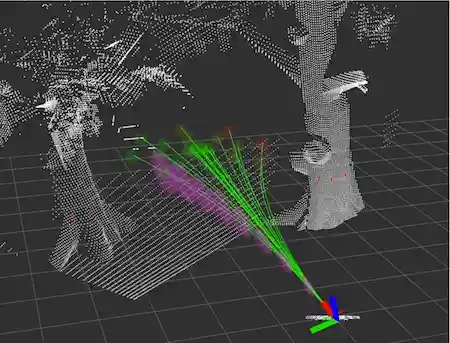
Integrated perception and control at high speed: Evaluating collision avoidance maneuvers without maps.
Peter R. Florence, John Carter, and Russ Tedrake. WAFR 2016.
[ pdf ] [ presentation ]