Zongqing's Homepage
Associate Professor
Peking University
I am a tenured Associate Professor in the School of Computer Science at Peking University (PKU).
I am the founder of BeingBeyond, a start-up company on foundation models for embodied intelligence.
My current research focuses on
- Reinforcement Learning
- Multimodal Models
- General Agents
with the aim of endowing robots/agents with the ability to autonomously acquire skills to accomplish tasks, cooperate, and communicate in the open world, towards artificial general intelligence.
Short Bio
I joined Peking University as an Assistant Professor at the School of Computer Science in Fall 2017 and have been a tenured Associate Professor since January 2024. Before that, I was a postdoc in the Department of Computer Science and Engineering, Pennsylvania State University. I received the PhD degree from the School of Computer Science and Engineering, Nanyang Technological University in 2014, master and bachelor degrees from Southeast University.
I am looking for self-motivated undergraduate students for research internships. I am recruiting PhD students (Fall 2027), RAs and postdocs at PKU. If you are interested, drop me an email.
Twelve papers accepted at CVPR'26, ICLR'26, ICRA'26, AAAI'26 and RAL
Six papers on embodied intelligence were accepted at CVPR’26, three papers on reinforcement learning were accepted at ICLR’26, and three papers on robot manipulation were accepted/published in ICRA’26, AAAI’26 and RAL. Congratulations to all.
Four papers accepted at NeurIPS'25
Four papers on multimodal LLMs, reinforcement learning, and robotics were accepted at NeurIPS’25. Congratulations to all.
Two papers accepted at EMNLP'25 and TMLR
Two papers on multimodal models were accepted respectively at EMNLP’25 and TMLR.
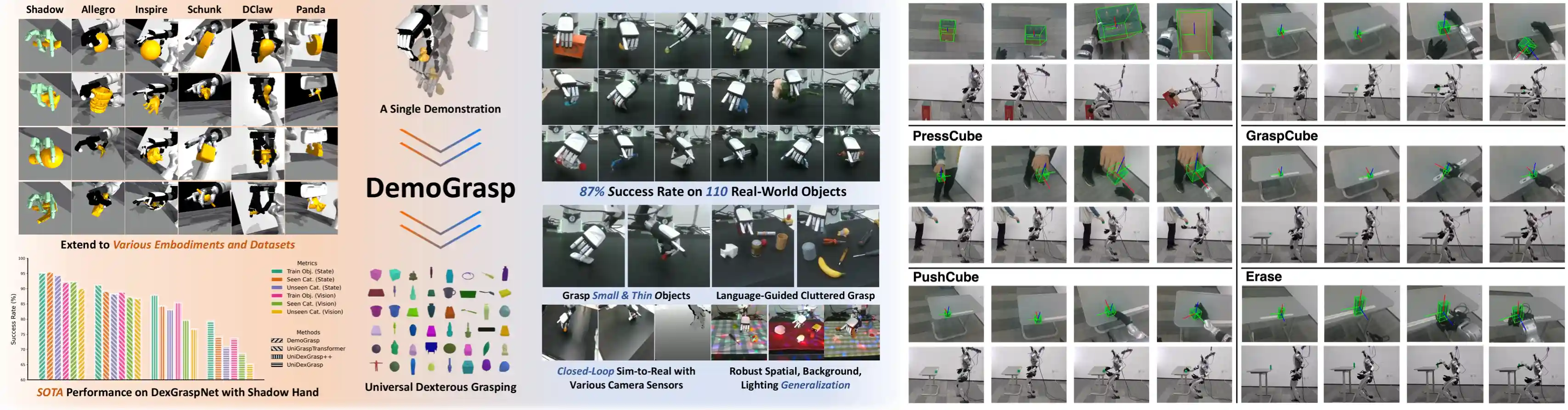
Embodied Intelligence
Embodied intelligence focuses on creating robots that can perceive, reason, and act in the physical world. It brings together dexterous hand manipulation, humanoid whole-body control, and foundation models that link perception, language, and action. By combining these elements, embodied AI aims to enable robots that can generalize and perform complex real-world tasks with human-like adaptability. Dexhand Manipulation Dexterous hand manipulation focuses on enabling robots to interact with objects with the precision, adaptability, and coordination of human hands. [Read More…]
Teaching
Undergraduate Courses
- Foundation Models and Agents, Fall 2024, 2025
Algorithms, Spring 2019, 2020, 2021, 2022Data Structures and Algorithms, Spring 2018Introduction to Computer Systems, Fall 2017
Gradudate Courses
- Deep Reinforcement Learning, Spring 2020, 2021, 2022, 2023, 2024, 2025, 2026
Services
Area Chair and Editorship
Area Chair, ICLR 2024 2025 2026, ICML 2024 2025 2026, NeurIPS 2024 2025
Associate Editor, ACM Journal on Autonomous Transportation Systems, 2022 -
Guest Editor, Machine Learning Special Issue on RL for Real Life, 2023
Conference Organization
NeurIPS 2024 Large-Scale Auction Challenge, Co-Organizer
IEEE Conference on Games 2022, Keynote Co-Chair
ICML 2021 Workshop on Reinforcement Learning for Real Life, General Co-Chair
INFOCOM 2020 Workshop on Network Intelligence, General Co-Chair
ACM TURC 2018, Award Co-Chair
Contact
- Room 523, Yanyuan Building, Peking University, Beijing, 100871, China.
- Office hour: please drop me an email to schedule