Haonan Chen
|
Haonan Chen I am a postdoc at Harvard University and a visiting postdoc at Stanford University, where I work with Yilun Du and Jiajun Wu. I am affiliated with the Harvard Embodied Minds Lab and the Stanford Vision and Learning Lab. Previously, I received my Ph.D. at UIUC, where I worked with Katie Driggs-Campbell and Yunzhu Li. My research focuses on Compositional Multisensory Intelligence for robotic manipulation. I develop structured compositional models that draw knowledge from policies, world models, and foundation models to help robots reason about the physical world and learn from heterogeneous data sources, including simulation, teleoperation, human video, and off-policy data.
I'm always excited to explore new collaborations in robotics and machine learning! If you're interested, please drop me an email. I'd love to chat!
haonan_chen [at] seas (dot) harvard (dot) edu /
haonan [at] cs (dot) stanford (dot) edu |

|
News
- To junior PhD/master/undergraduate students: If you'd like to chat about life, career plans, or research ideas in ML/robotics, please feel free to email me to schedule a meeting. I dedicate 30 minutes each week for these conversations and encourage students from underrepresented groups or anyone in need to reach out.
- [2025/10] I gave a talk at Computational Robotics Lab at Harvard
- [2025/06] I gave a talk at Professor Jiajun Wu's Lab at Stanford
- [2025/05] Co-organizing the ICRA 2025 Workshop on Learning Meets Model-Based Methods for Contact-Rich Manipulation
- [2025/04] I gave a talk at Professor Animashree Anandkumar's Lab at Caltech
- [2025/04] I gave a talk at Professor Katerina Fragkiadaki's Lab at Carnegie Mellon University
[Show more]
Awards and Honors
- Conference Travel Award, Graduate College, University of Illinois Urbana-Champaign 2023
- Finalist - Best Paper/Best Student Paper Awards, Conference on Robot Learning 2023
- Bronze Tablet Award, University of Illinois Urbana-Champaign 2020
- Excellent Graduate, Zhejiang University 2020
- Student Speaker at Graduation, ZJU-UIUC Institute 2020
- Provincial Scholarship, Zhejiang Province, China (Top 3%) 2019
- Dean's List, University of Illinois Urbana-Champaign 2019
- National Scholarship, China (Top 1.8%) 2018
- Excellent Undergraduate Scholarship, Zhejiang University (Top 3%) 2018-2019
- Academic Excellence Scholarship Award, ZJU-UIUC Institute 2017-2019
- Top Ten Social Practice, Zhejiang University (Top 1.5%) 2017
Service and Leadership
-
Robotics Seminar @ Illinois
Organizer August 2023 - May 2025 -
Coordinated Science Laboratory Student Conference
Organizer 2024
Professional Service
- Session Chair:
- CASE - IEEE Conference on Automation Science and Engineering, 2023
- Reviewer:
- CoRL - Conference on Robot Learning
- ICRA - IEEE International Conference on Robotics and Automation
- ICLR - International Conference on Learning Representations
- RA-L - IEEE Robotics and Automation Letters
- ITSC - IEEE International Conference on Intelligent Transportation Systems
- CASE - IEEE Conference on Automation Science and Engineering
Extra-Curricular Service
Founding Team Leader, Robotic Team for RoboMaster Challenge, ZJU-UIUC Institute 10/2017 - 06/2018
|
|
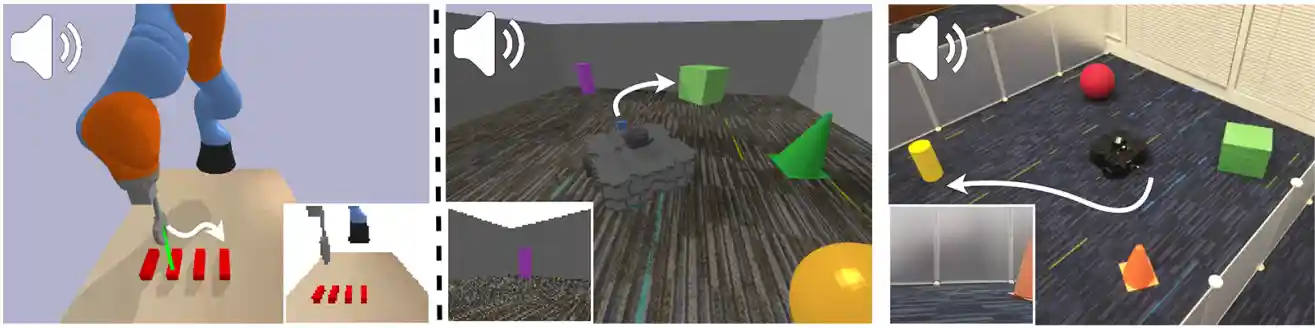
Multi-Modal Manipulation via Multi-Modal Policy Consensus
Haonan Chen, Jiaming Xu*, Hongyu Chen*, Kaiwen Hong, Binghao Huang, Chaoqi Liu, Jiayuan Mao, Yunzhu Li, Yilun Du+, and Katherine Driggs-Campbell+ * Equal contribution, + Equal advising ICRA 2026, [Project] [Paper] [Code] [Dataset] [Video] [Audio] [Blog] [Deepwiki] Featured in Video Friday on [IEEE Spectrum] |
|
|
Flexible Multitask Learning with Factorized Diffusion Policy
Chaoqi Liu, Haonan Chen, Sigmund H. Høeg*, Shaoxiong Yao*, Yunzhu Li, Kris Hauser, Yilun Du * Equal contribution RA-L 2026, [Project] [Paper] |
|
|
Tool-as-Interface: Learning Robot Policies from Observing Human Tool Use
Haonan Chen, Cheng Zhu, Shuijing Liu, Yunzhu Li, and Katherine Driggs-Campbell CoRL 2025, [Project] [Paper] [Code] Best Paper Award at ICRA 2025 Workshop on Foundation Models and Neuro-Symbolic AI for Robotics [Link] Best Presentation Award at CSL Student Conference 2025 [Link] Featured in Video Friday on [IEEE Spectrum] Media Coverage: [The Grainger College of Engineering], [TechXplore], [Hackster.io] |
|
|
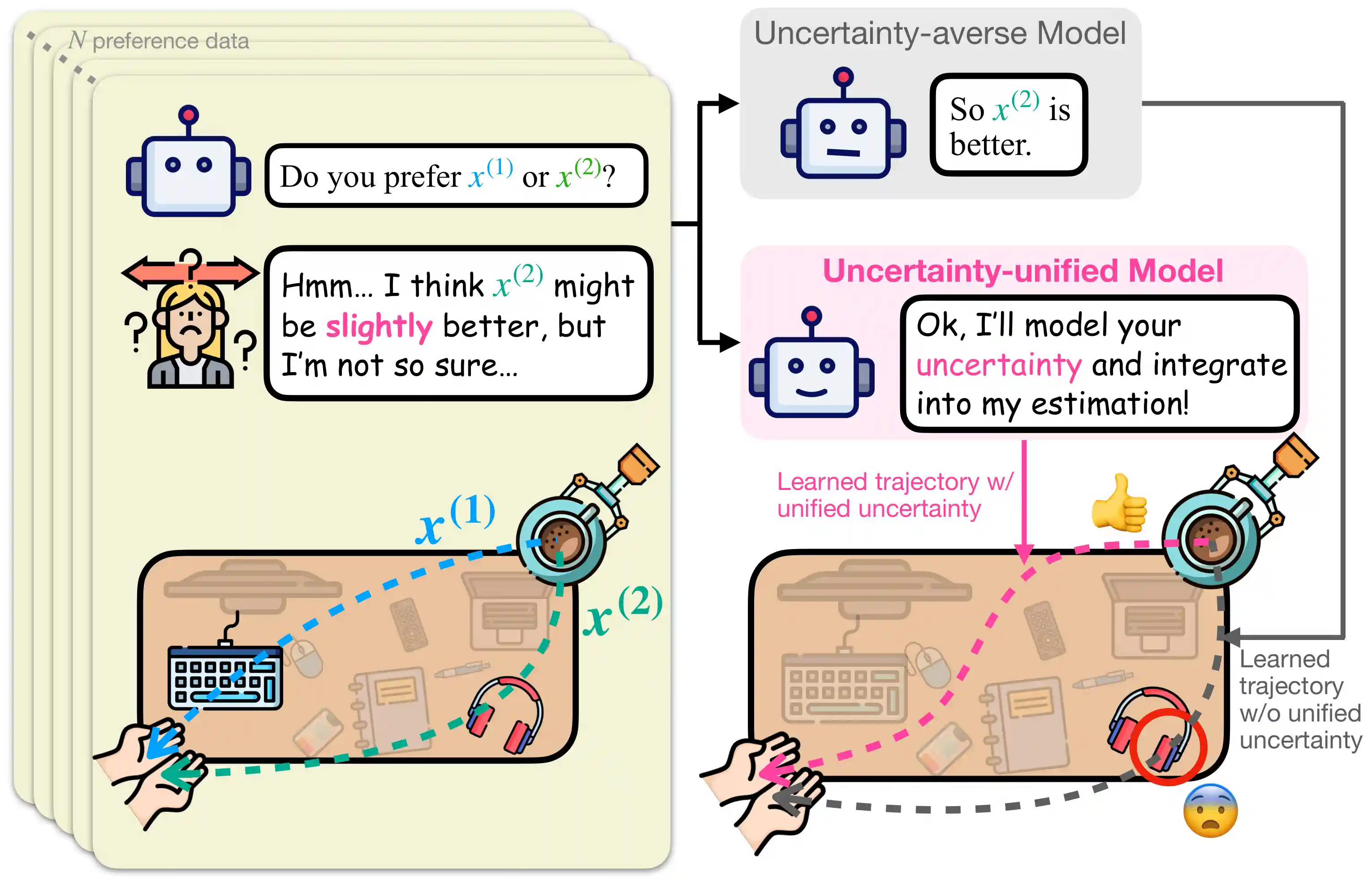
Towards Uncertainty Unification: A Case Study for Preference Learning
Shaoting Peng, Haonan Chen, and Katherine Driggs-Campbell RSS 2025, [Paper] |
|
|
Learning Coordinated Bimanual Manipulation Policies using State Diffusion and Inverse Dynamics Models
Haonan Chen, Jiaming Xu*, Lily Sheng*, Tianchen Ji, Shuijing Liu, Yunzhu Li, and Katherine Driggs-Campbell ICRA 2025, [Project] [Paper] |
|
|
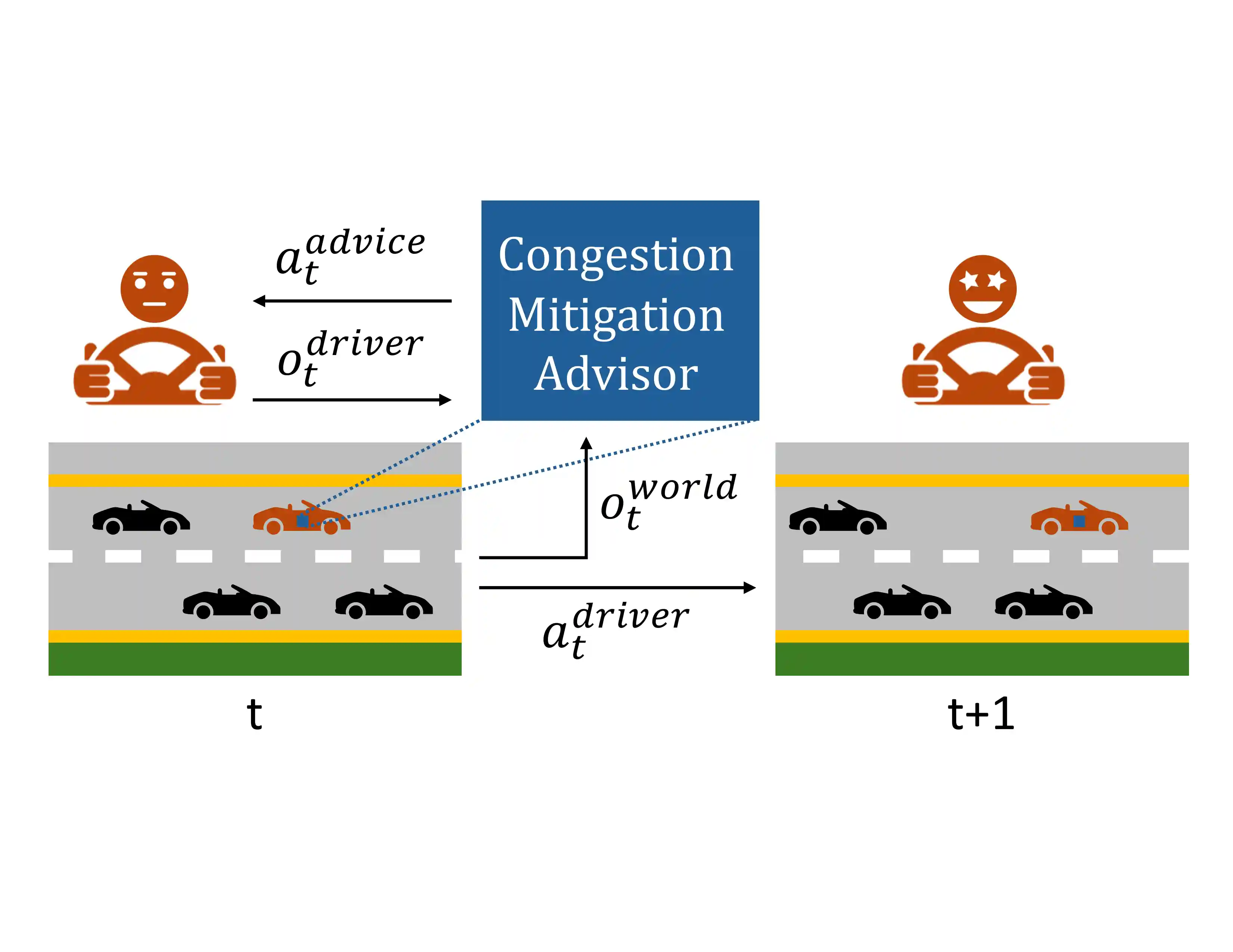
Cooperative Advisory Residual Policies for Congestion Mitigation
Aamir Hasan, Neeloy Chakraborty, Haonan Chen, Jung-Hoon Cho, Cathy Wu, and Katherine Driggs-Campbell JATS 2024, [Paper] |
|
|
Lessons in Cooperation: A Qualitative Analysis of Driver Sentiments towards real-time Advisory Systems through a Focus Group User Study
Aamir Hasan, Neeloy Chakraborty, Haonan Chen, Jung-Hoon Cho, Cathy Wu, and Katherine Driggs-Campbell ITSM 2024, [Paper] |
|
|
Predicting Object Interactions with Behavior Primitives: An Application in Stowing Tasks
Haonan Chen, Yilong Niu*, Kaiwen Hong*, Shuijing Liu, Yiqing Wang, Yunzhu Li, and Katherine Driggs-Campbell CoRL 2023, [Project] [Paper] Finalist - Best Paper/Best Student Paper Awards |
|
|
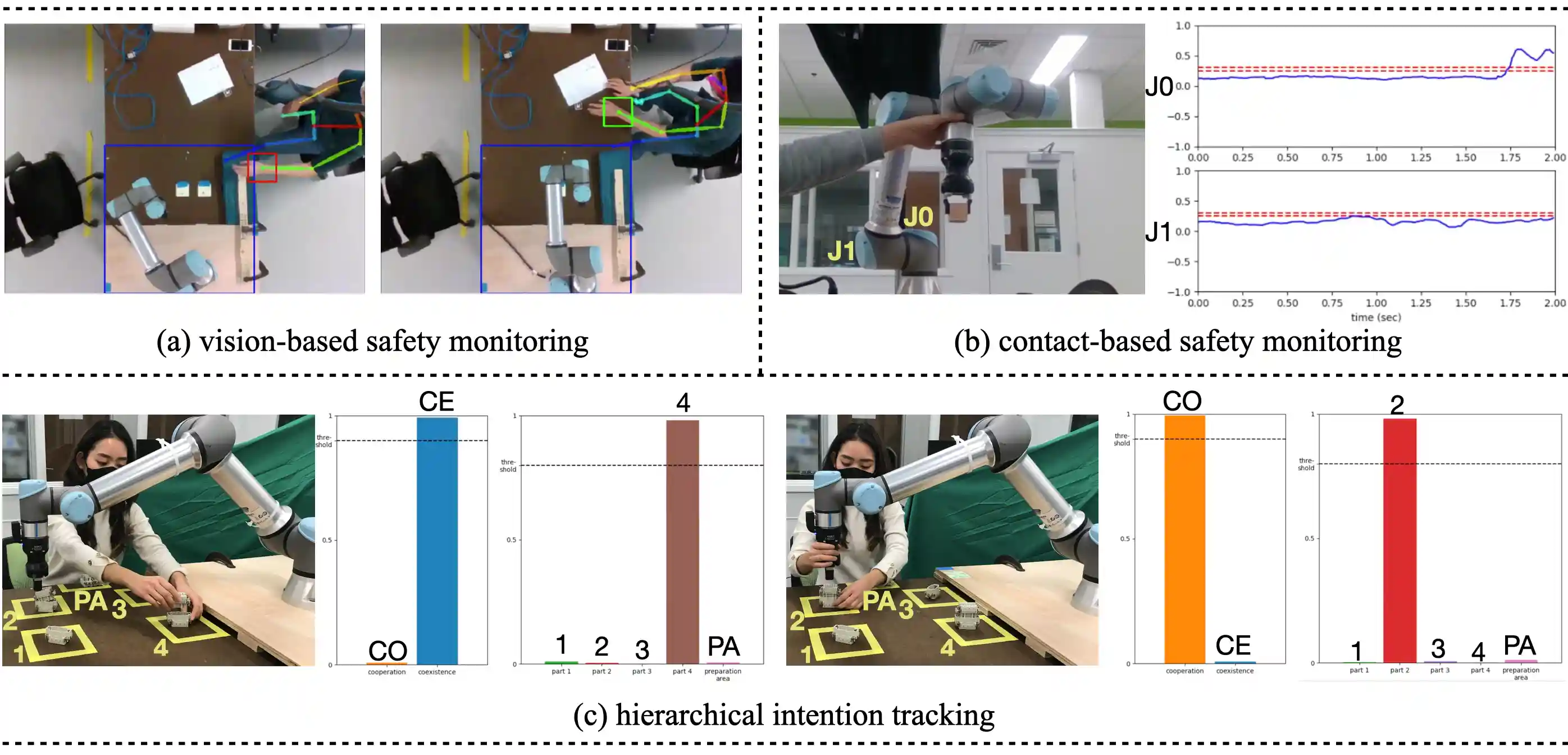
Towards Safety of Multi-Level Human-Robot Interaction in Industrial Tasks
Zhe Huang, Yeji Mun, Haonan Chen, Yiqing Xie, Yilong Niu, Xiang Li, Ninghan Zhong, Haoyuan You, Daniel L. McPherson, and Katherine Driggs-Campbell CASE 2023 (Special Session) |
|
|
Learning Task Skills and Goals Simultaneously from Physical Interaction
Haonan Chen*, Yeji Mun*, Zhe Huang, Yilong Niu, Yiqing Xie, D. Livingston McPherson, and Katherine Driggs-Campbell CASE 2023 (Special Session) |
|
|
PeRP: Personalized Residual Policies For Congestion Mitigation Through Co-operative Advisory Systems
Aamir Hasan, Neeloy Chakraborty*, Haonan Chen*, Jung-Hoon Cho, Cathy Wu, and Katherine Driggs-Campbell ITSC 2023, [Paper] [Website] Best Presentation Award at CSL Student Conference 2024 |
|
|
Combining Model-Based Controllers and Generative Adversarial Imitation Learning for Traffic Simulation
Haonan Chen, Tianchen Ji, Shuijing Liu, and Katherine Driggs-Campbell ITSC 2022, [Paper] |
|
|
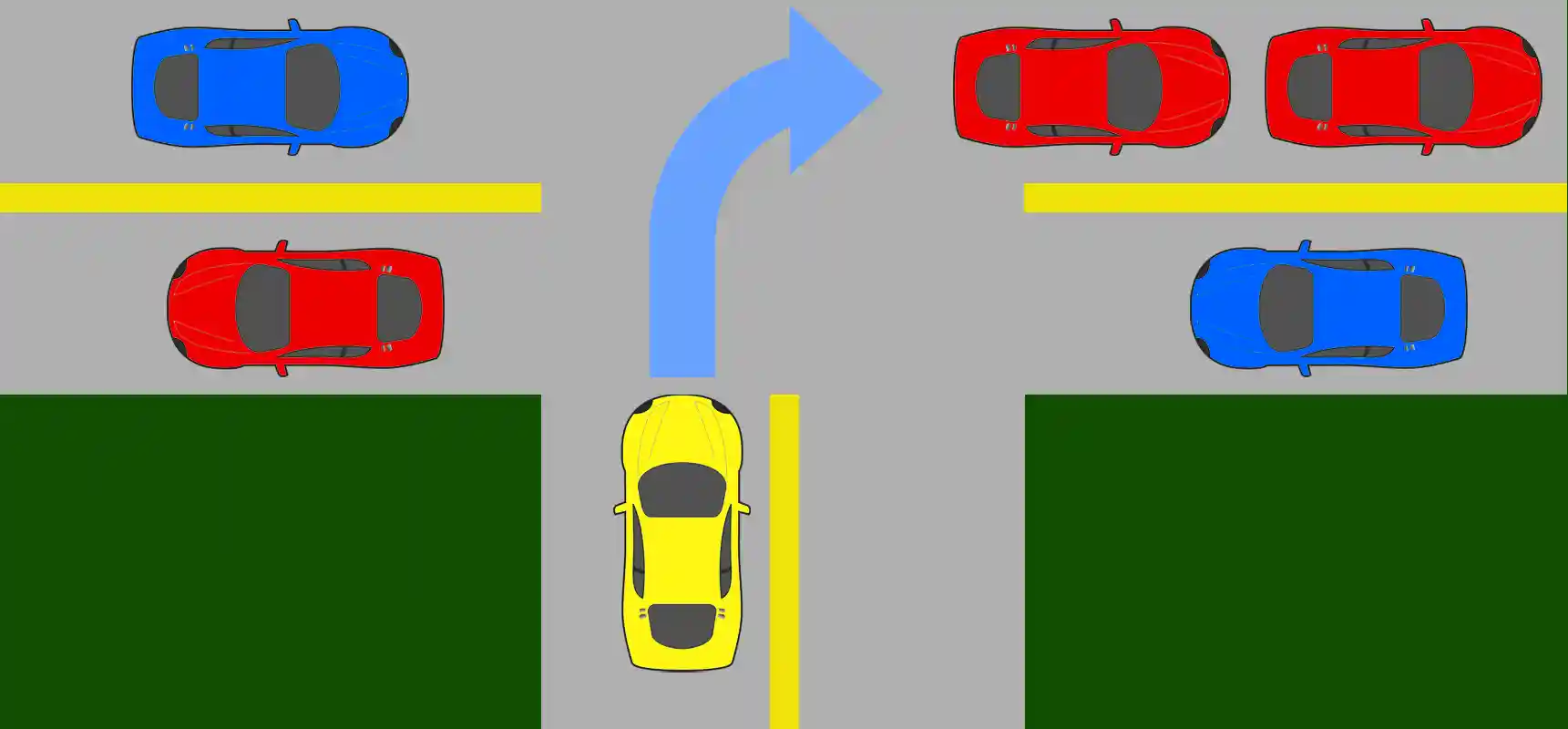
Learning to Navigate Intersections with Unsupervised Driver Trait Inference
Shuijing Liu, Peixin Chang, Haonan Chen, Neeloy Chakraborty, and Katherine Driggs-Campbell ICRA 2022, [Paper] [Website] [Video] |
|
|
Robot Sound Interpretation: Combining Sight and Sound in Learning-Based Control
Peixin Chang, Shuijing Liu, Haonan Chen, and Katherine Driggs-Campbell IROS 2020, [Paper] [Video] |